

High-precision pedestrian foot navigation algorithm based on multi-information fusion compensation
A technology of multi-information fusion and navigation algorithm, which is applied in the field of pedestrian high-precision foot navigation algorithm and high-precision pedestrian foot navigation algorithm based on multi-information fusion compensation, and can solve the problems of large error and error of inertial sensor.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0056] The present invention will be further explained below in conjunction with the accompanying drawings.
[0057] The present invention can be better understood from the following examples. However, those skilled in the art will readily understand that the specific material ratios, process conditions and results described in the examples are only used to illustrate the present invention, and should not and will not limit the present invention described in detail in the claims .
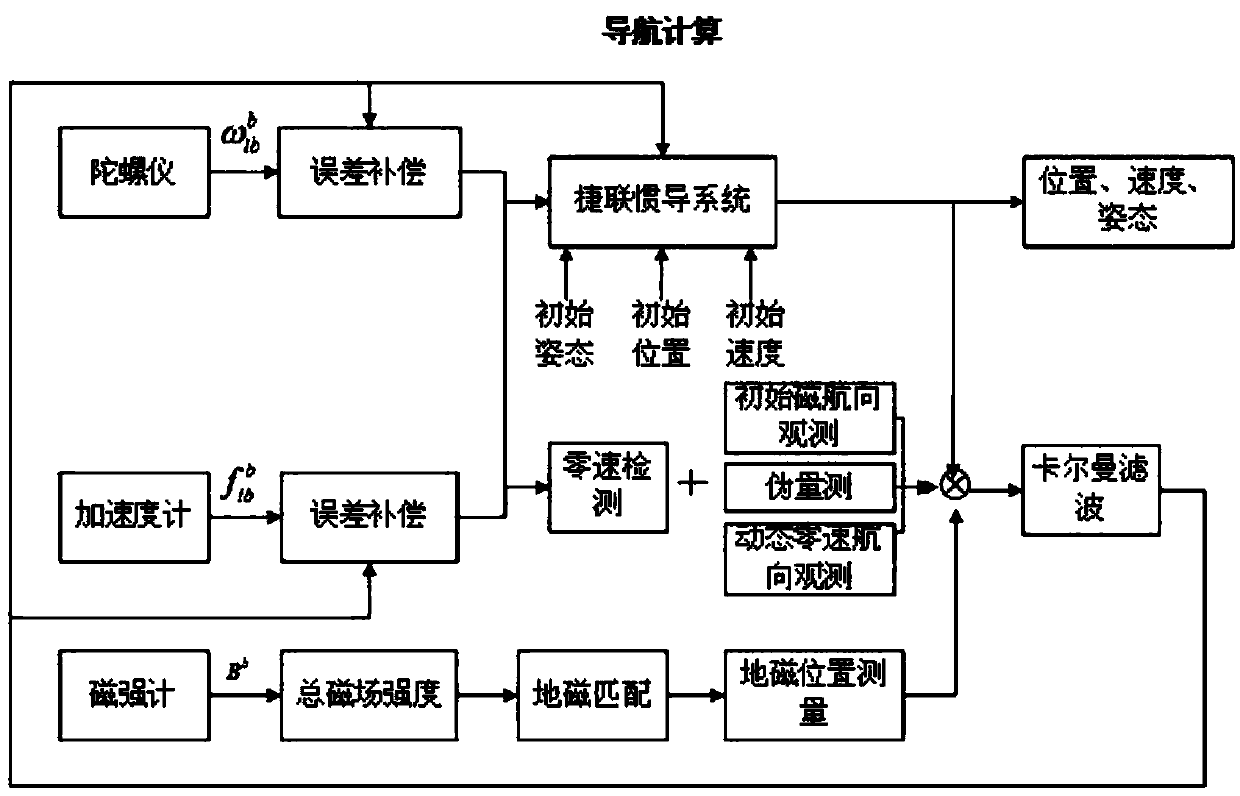
[0058] Such as Figure 1 As shown, on the basis of the known initial position, velocity, and attitude of the pedestrian, the information of the accelerometer and gyroscope is collected in real time for strapdown inertial navigation calculation, and the velocity, position, and attitude of the inertial navigation solution are obtained; using the accelerometer, gyroscope The zero-speed detection module and the magnetometer information are used for zero-speed detection in the zero-speed detection mod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More