

Intelligent navigation method for weak-signal region based on topological map
A topological map and intelligent navigation technology, applied in the field of navigation, can solve problems such as getting lost, unavailable positioning and navigation, and inability to provide reliable navigation services for users
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0099]The intelligent navigation method for weak signal areas based on topological maps of the present embodiment includes the following steps:
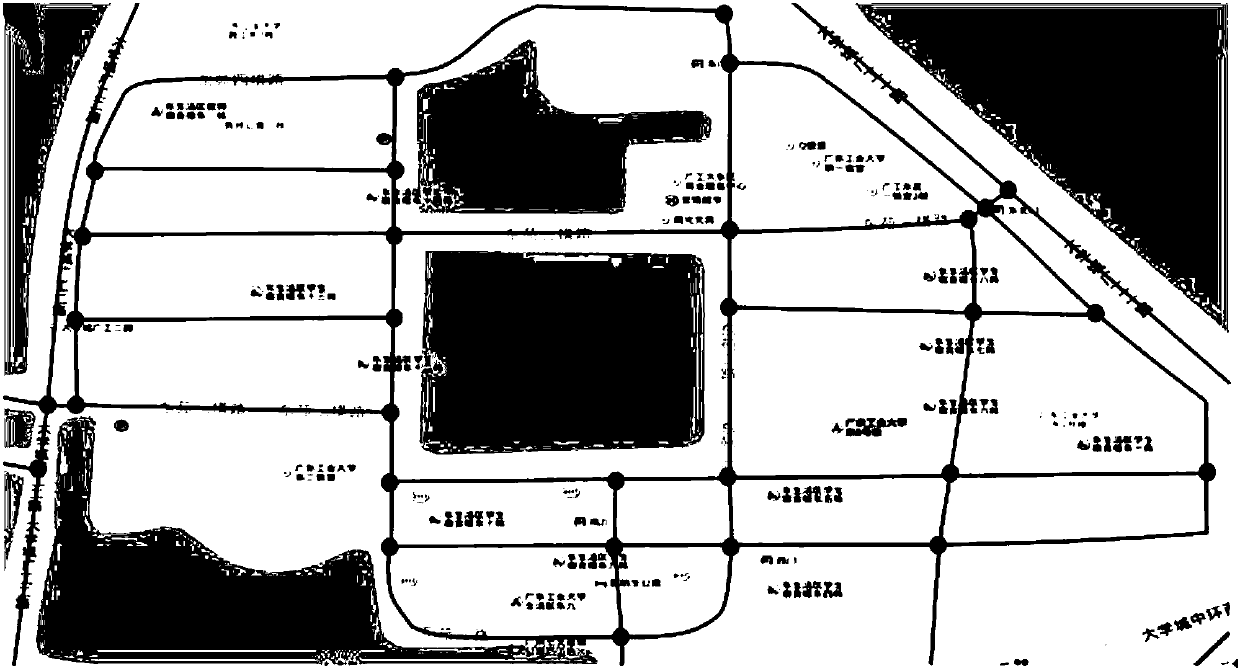
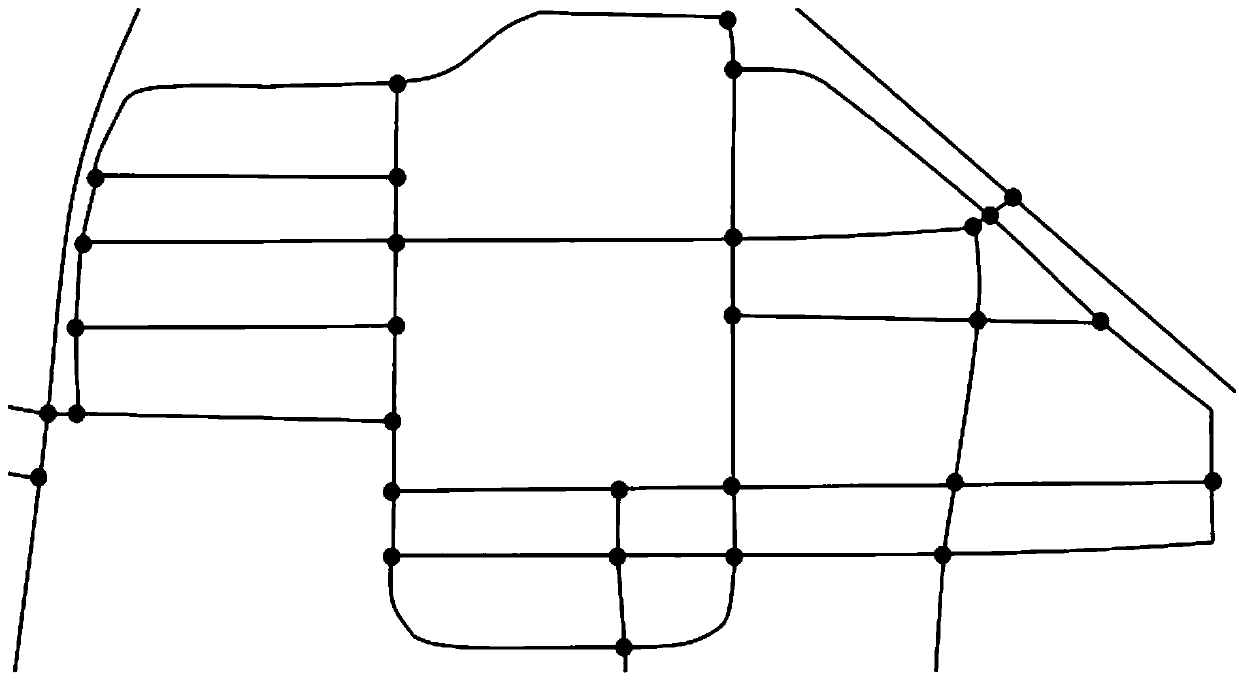
[0100] Step A, the mobile terminal obtains the grid map of the required navigation area and converts it into a topological map, such as figure 1 , figure 2 shown;
[0101] Step B, the user marks the starting node P and the target node Q on the topological map;
[0102] Step C, selecting a navigation path planning mode on the mobile terminal, and generating a corresponding optimal navigation path;
[0103] Step D, the user inputs driving parameters to the mobile terminal, and the mobile terminal navigates the user to the target node Q according to the driving parameters and the navigation route planning method.
[0104] Preferably,
[0105] Said step D comprises:
[0106] "Drive" navigation mode:
[0107] Step D11, the user inputs driving parameters to the mobile terminal: average driving speed N1;
[0108] The mobile terminal...
Embodiment 2
[0194] The intelligent navigation method for weak signal areas based on topological maps of the present embodiment includes the following steps:
[0195] S10: The mobile terminal obtains the grid map of the required navigation area and converts it into a topological map.
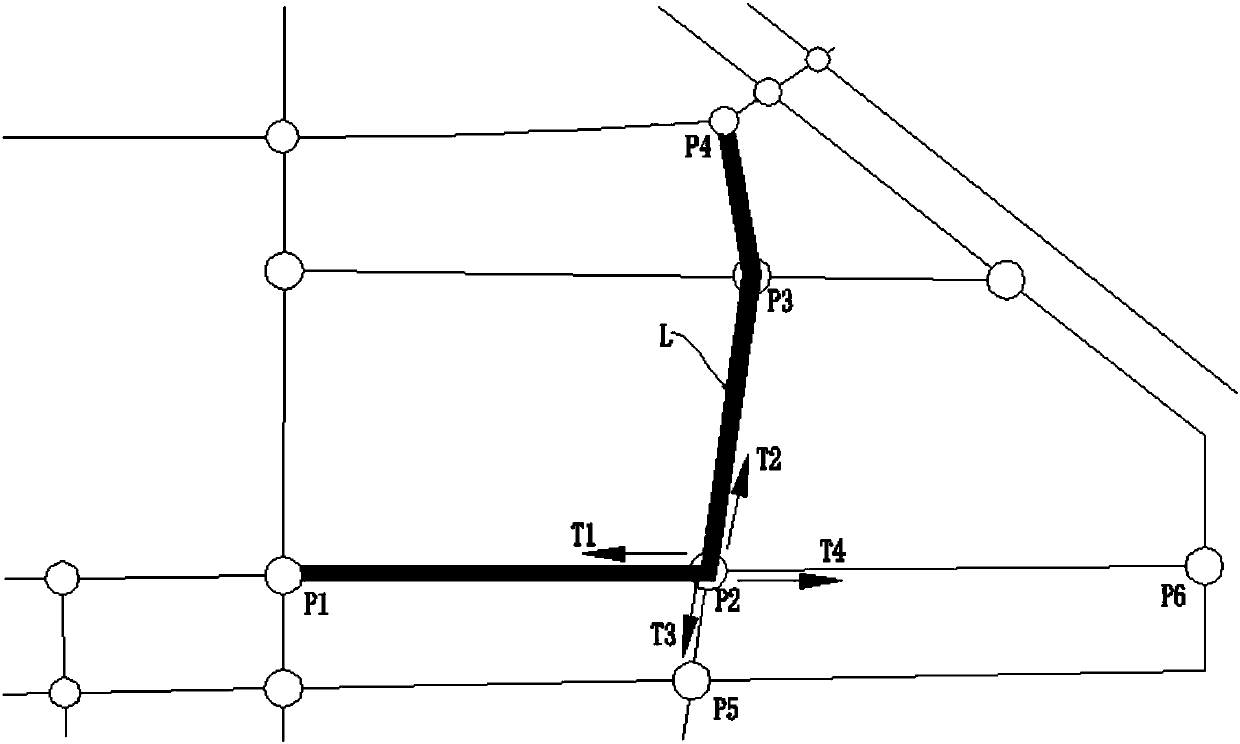
[0196] S20: The user marks the starting node P (ie, the current location) and the target node Q (ie, the destination) on the topological map.
[0197] S30: Select a navigation route planning method on the mobile terminal.
[0198] S40: The user inputs driving parameters to the mobile terminal, and the mobile terminal navigates the user to the target node Q according to the driving parameters and the navigation route planning method.
[0199] like image 3 As shown, the node P1 is the starting node P, the node P4 is the target node Q, and the navigation path planning method is selected as automatically planning the shortest path, and the path L is the best path from the node P1 to the node P4 according to t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More