

Robot indoor positioning method based on ceiling images
An indoor positioning and robot technology, applied in the field of visual navigation, can solve the problems of weak indoor positioning and navigation adaptability of robots, failure of positioning and navigation algorithms, and changing object image characteristics, etc., to improve computing efficiency and real-time performance, reduce requirements, and achieve real-time accuracy high effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] It should be noted that the embodiments of the present invention and the features in the embodiments can be combined with each other if there is no conflict.
[0031] Hereinafter, the present invention will be described in detail with reference to the drawings and in conjunction with the embodiments.
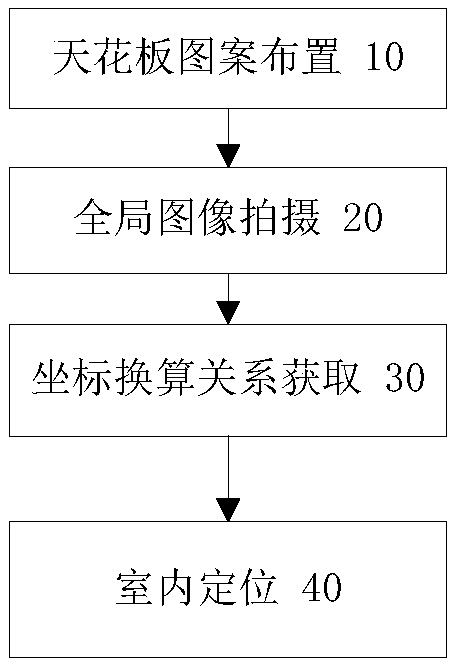
[0032] Such as figure 1 As shown, the indoor positioning method of the robot based on the ceiling image of the present invention includes the following steps:
[0033] (1) Ceiling pattern arrangement: The pattern is arranged on the ceiling in advance to ensure that the image in the field of view of the camera at any position is obviously different from the image in the field of view of the adjacent position;
[0034] In the example, a printed color pattern is used and posted on the ceiling.
[0035] (2) Global image capture: Program the robot to traverse the indoor location in the same direction and take photos through the top camera to ensure that the captured photos contain all t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More