

Unmanned vehicle navigation positioning precision correcting method based on GNSS and VO combination
An unmanned vehicle, navigation and positioning technology, applied in the field of unmanned vehicle navigation and positioning accuracy correction, can solve the problems of poor reliability, low accuracy, and high cost of integrated navigation systems, and achieves low cost, improved reliability, and small size. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] Embodiments of the invention are described in detail below, examples of which are illustrated in the accompanying drawings. The embodiments described below by referring to the figures are exemplary only for explaining the present invention and should not be construed as limiting the present invention.
[0024] Such as Figure 4 As shown, the unmanned vehicle navigation and positioning accuracy correction method based on GNSS and VO fusion includes the following steps:
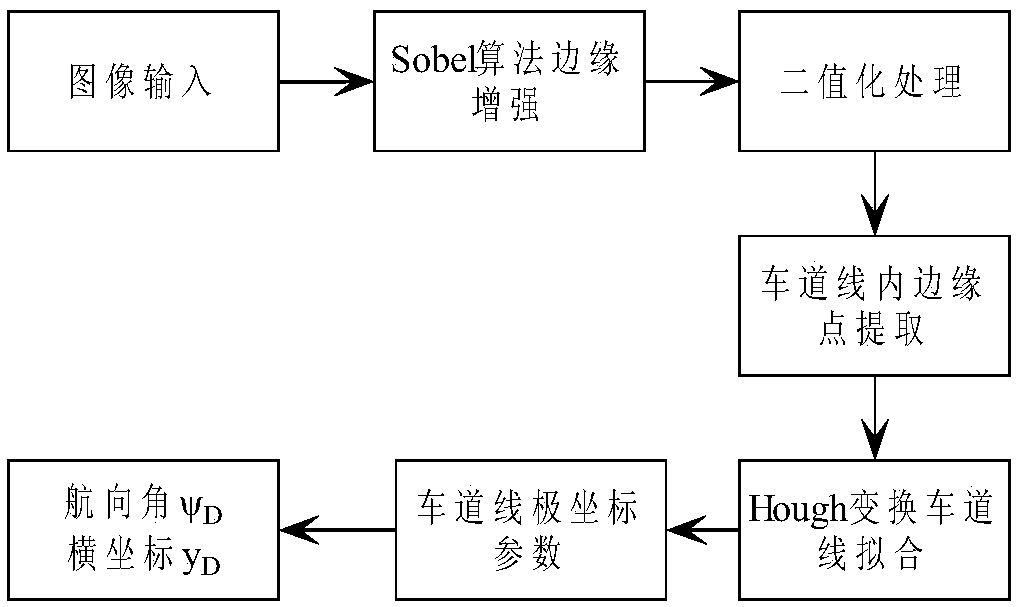
[0025] (1) Lane line detection based on monocular vision;
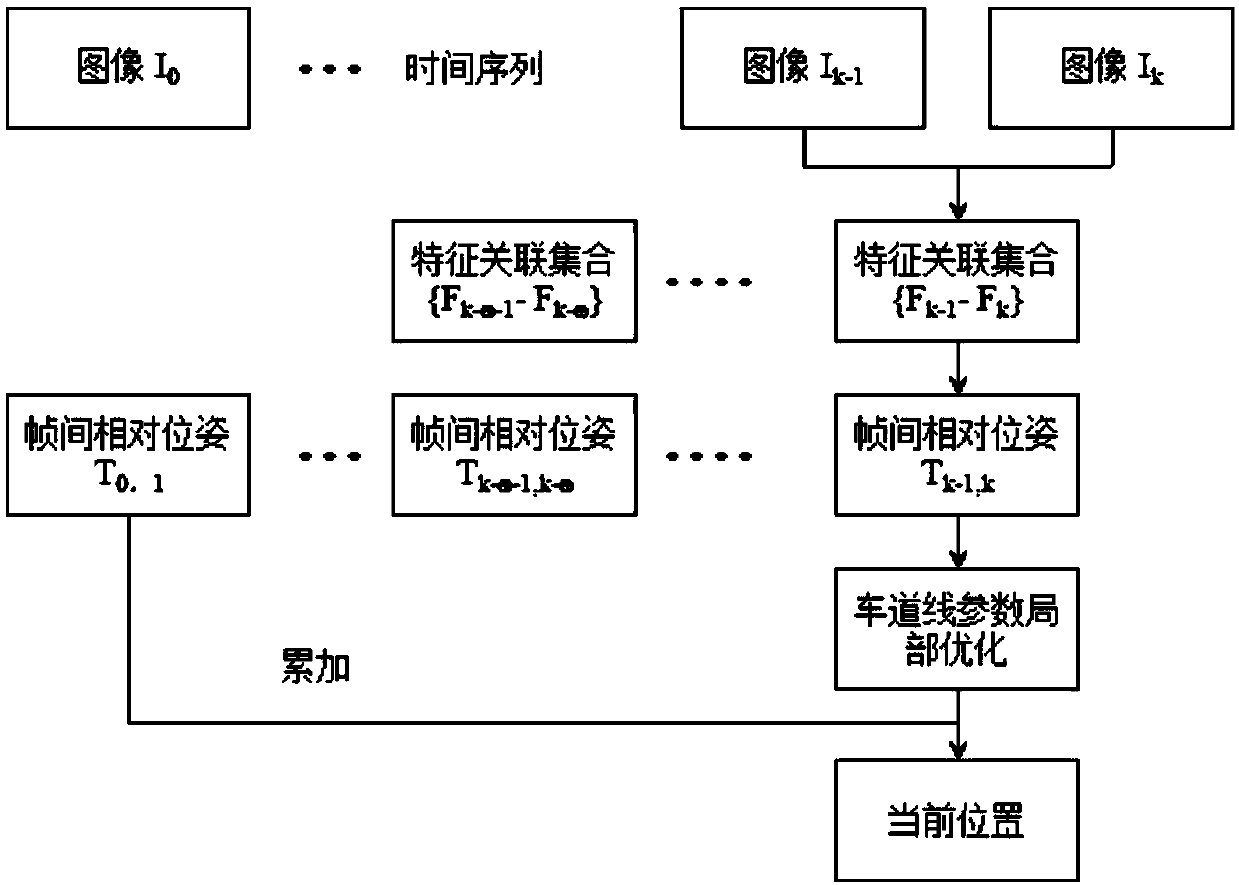
[0026] (2) Optimizing the positioning accuracy of the monocular visual odometer;
[0027] (3) Positioning accuracy correction of GNSS and visual odometer integrated navigation system.
[0028] Such as figure 1 Shown is a flow chart of lane line detection in the present invention. The specific process is as follows: read a frame of image, process the image line by line, use the Sobel algorithm sensitive to the horizontal direction to enhance...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More