

Bionic pulling and pressing body system design method
A bionic tension-compression body and system design technology, applied in the field of bionic robots, can solve the problems of personal injury, unnatural gait, and high energy consumption, and achieve the effects of reducing impact and collision, prolonging service life, and improving safety.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
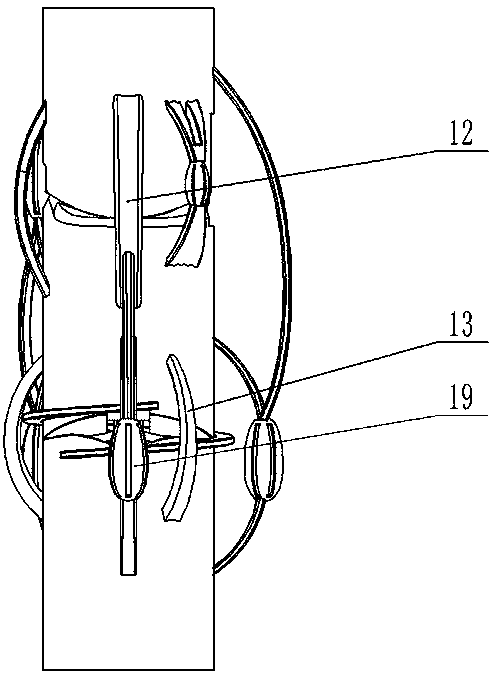
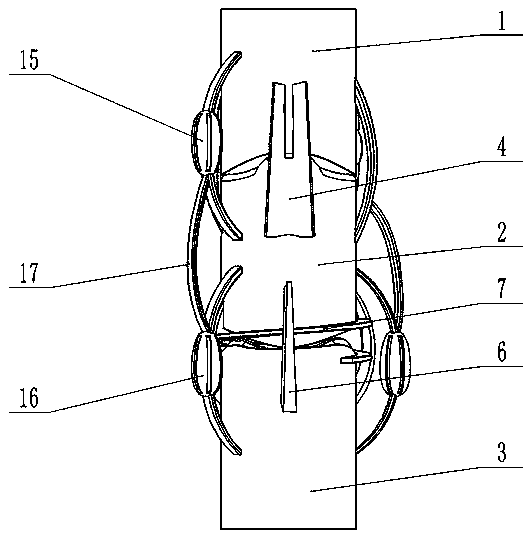
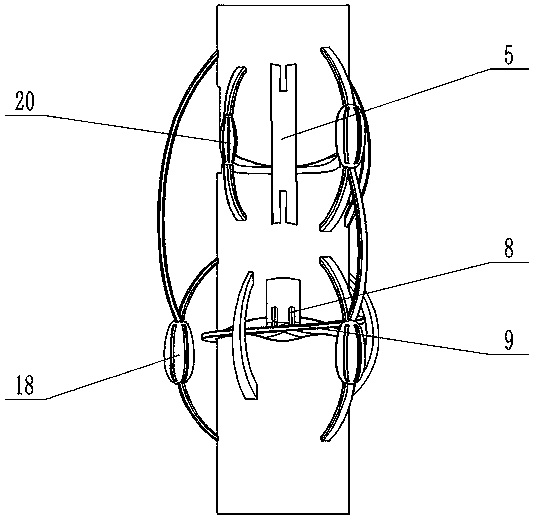
[0044] see figure 1 , figure 2 , image 3 , Figure 4 and Figure 5 As shown, the second-order bionic tension-compression body system in the present invention includes a first hard component 1, a second hard component 2, a third hard component 3, a first passive flexible component 4, a second passive flexible component 5, the third passive flexible component 6, the fourth passive flexible component 7, the fifth passive flexible component 8, the sixth passive flexible component 9, the seventh passive flexible component 10, the fifth passive flexible component The eighth passive flexible member 11, the ninth passive flexible member 12, the tenth passive flexible member 13, the eleventh passive flexible member 14, the first active drive flexible member 15, the second active drive type flexible member 16, the third actively driven flexible member 17, the fourth actively driven flexible member 18, the fifth actively driven flexible member 19, the sixth actively driven flexibl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More