

Integrated navigation method based on vision and high-precision map lane line constraint
A technology of integrated navigation and lane lines, applied in the field of navigation, can solve the problem of low availability of vehicle integrated navigation algorithms, achieve the effects of optimizing algorithm performance and availability, improving usability, and improving performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0046] The embodiment of the present application provides an integrated navigation method based on vision and high-precision map lane line constraints, which solves the problem in the prior art that GNSS is susceptible to interference and occlusion in an urban environment, resulting in low availability of vehicle integrated navigation algorithms.
[0047] The technical solution of the embodiment of the present application is to solve the above-mentioned technical problems, and the general idea is as follows:
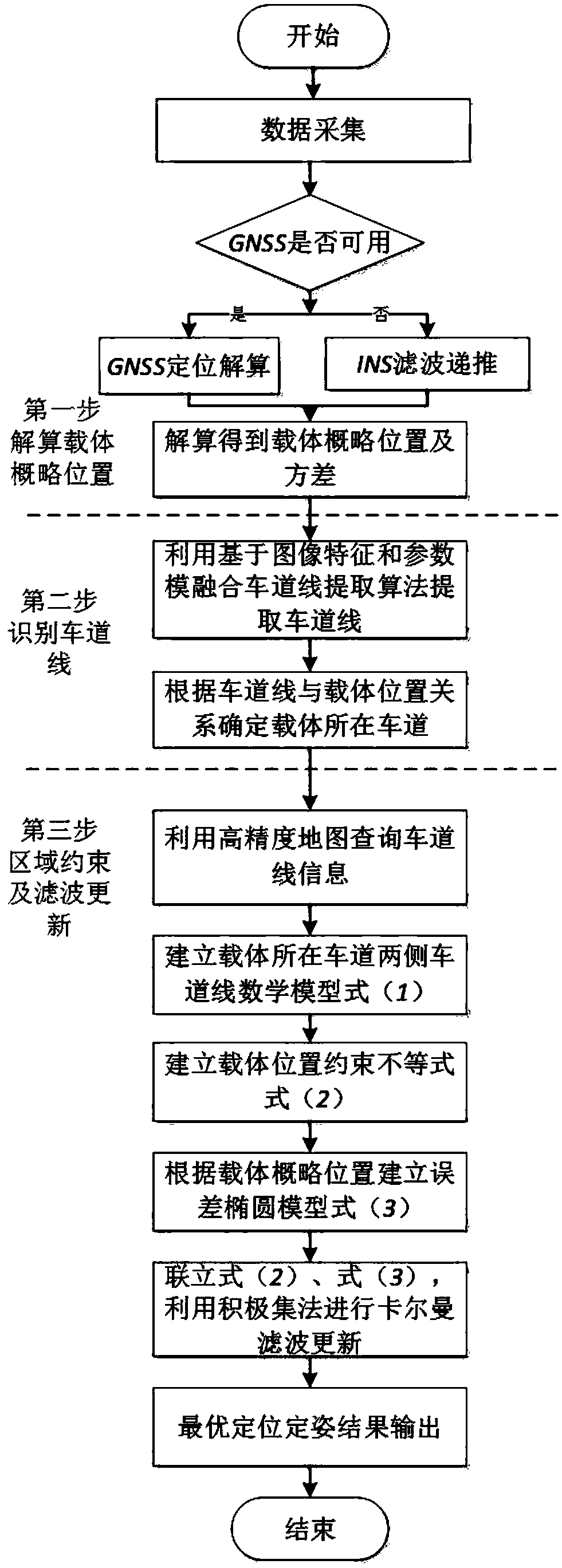
[0048] A combined navigation method based on visual and high-precision map lane line constraints, comprising the following steps:
[0049] Step 1. Obtain the approximate position and accuracy evaluation index of the carrier through GNSS / INS integrated navigation and positioning;
[0050] Step 2. Recognize the lane line and determine the lane where the carrier is located through visual aids;
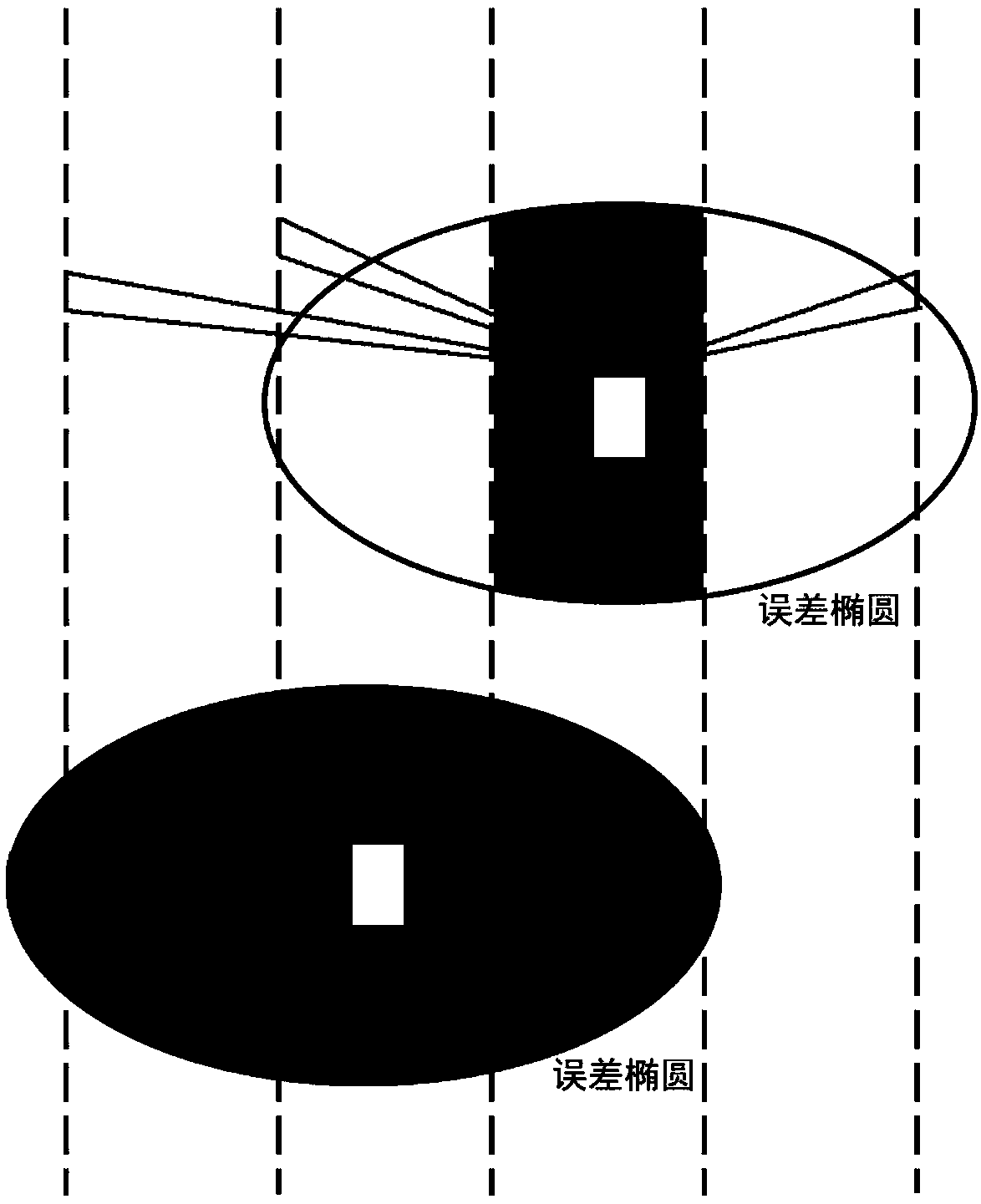
[0051] Step 3. Combining the high-precision map to form a carrier position are...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More