Rotor unmanned plane collision avoidance millimeter wave radar signal processing method
A millimeter-wave radar and unmanned rotor technology, applied in the field of signal processing, can solve problems such as collisions and achieve accurate target judgment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0018] Embodiment 1: a kind of rotor UAV anti-collision millimeter-wave radar signal processing method, comprises the following steps:
[0019] S1. AD data collection;
[0020] S2. to direct current;
[0021] S3. Window function processing;
[0022] S4. FFT transformation;
[0023] S5. Threshold detection;
[0024] S6. Binary detection;
[0025] S7. Calculate one or a combination of speed, distance or angle.
[0026] in:
[0027] The concrete method of described step S1 is:
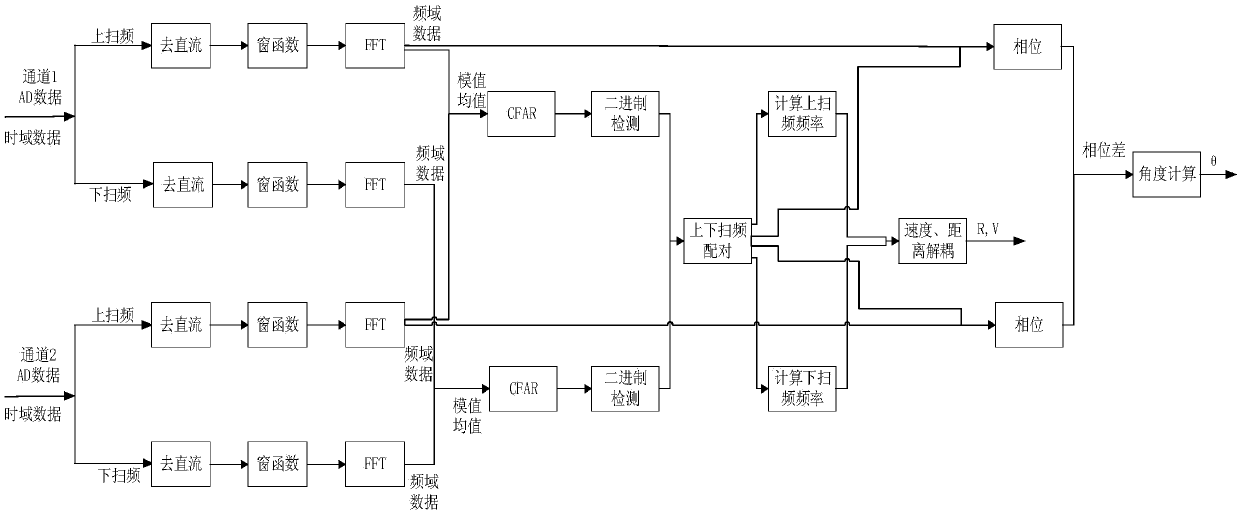
[0028] (1) digitize the continuous IQ data in channel 1 and channel 2 through AD sampling;
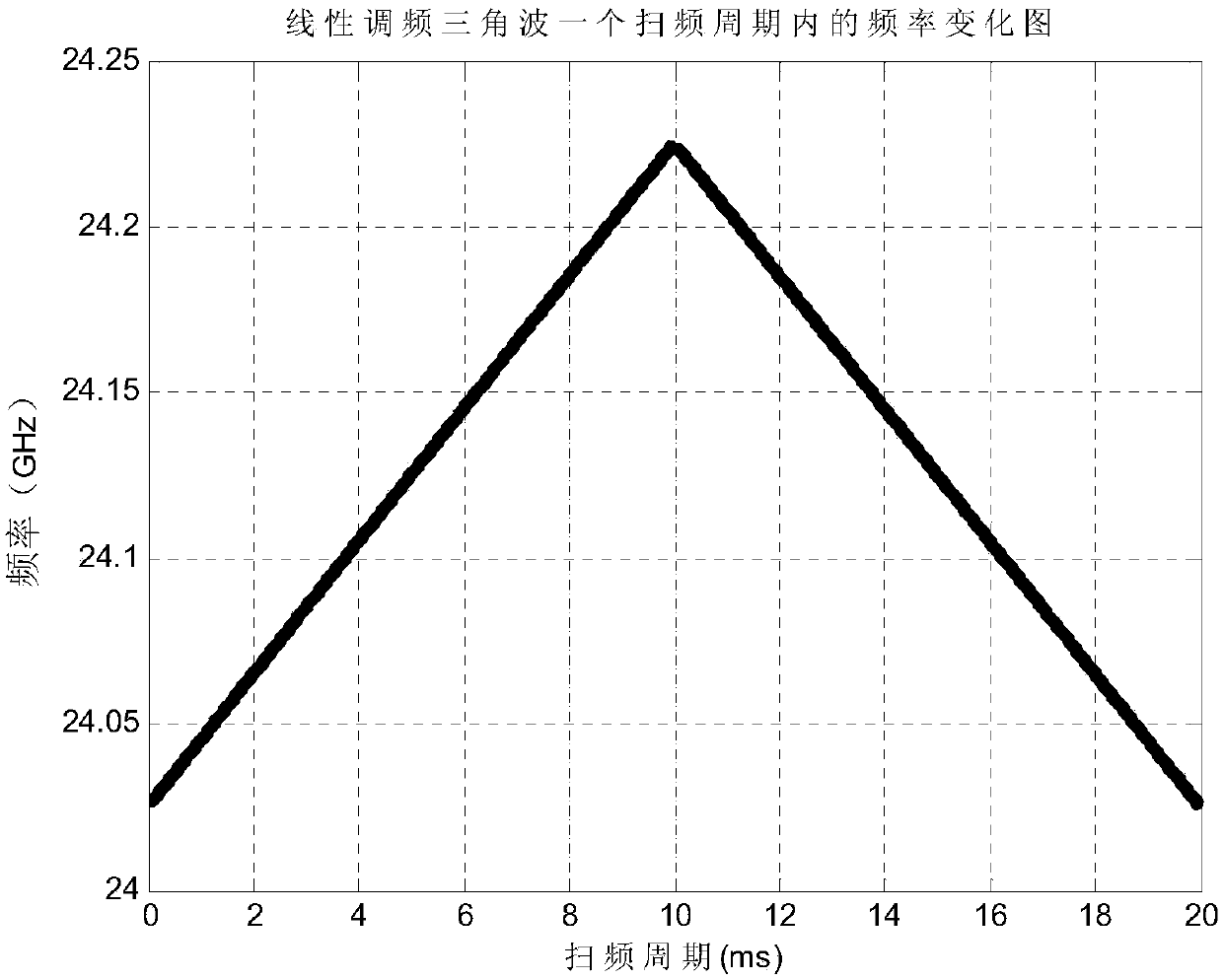
[0029] (2) Divide the data collected in channel 1 and channel 2 into up-sweep data and down-sweep data of the triangular wave, remove the first part of the data points and go to direct current, perform time-frequency FFT transformation, and convert the time-domain data into Frequency data; the removal of the first part of the data points is to remove the first part of the data points collected by AD in the...
Embodiment 2
[0053] Embodiment 2: This embodiment is a supplement to Embodiment 1. This embodiment mainly introduces the use of millimeter wave radar to realize the obstacle avoidance function of the drone. Since the working wavelength of the millimeter-wave radar is between 1mm and 10mm, compared with other detection methods, it mainly has the advantages of stable detection performance, good environmental adaptability, small size, low price, and can be used in relatively bad rainy and snowy weather. Therefore, the present invention focuses on the realization of the signal processing method of the UAV obstacle avoidance function system based on the millimeter wave radar.
[0054] This embodiment is mainly to complete the measurement of the distance, speed and orientation of the environmental obstacles in front of the rotor drone by the rotor drone. The obstacles ahead are mainly for people, trees, walls, nets, and high-voltage lines. The patent of this embodiment mainly uses the millimete...
Embodiment 3
[0086] Embodiment 3: For the peak processing in each of the above schemes, this embodiment provides a peak processing method applied to UAV signals:
[0087] Set a peak point threshold factor α, which is used to limit the absolute value of the difference between the detected maximum peak point crossing the threshold and the maximum peak point that appeared in the previous cycle, so that the absolute value of the difference must not be greater than the peak point threshold factor α:
[0088] The expression is as follows:
[0089] |L_max(k)-L_max(k-1)|≤α;
[0090]
[0091] Among them: L_max(k) is the coordinate of the maximum peak point crossing the threshold in k period, L_max(k-1) is the coordinate of the maximum peak point in the previous period, and k represents the kth moment; v max is the maximum flight speed of the UAV, λ is the millimeter-wave radar wavelength, fs is the sampling rate, and N is the number of FFT points;
[0092] If at time k, the absolute value diff...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com