

Automatic feeding and grabbing device for sheet-type parts with rough surfaces
A rough surface and automatic feeding technology, which is applied in the direction of manipulators, program-controlled manipulators, chucks, etc., can solve problems such as high labor intensity, error-prone, and falling, and achieve high work efficiency, high positioning accuracy, and firm grasping Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The embodiments of the present invention are described in detail below. This embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following implementation example.
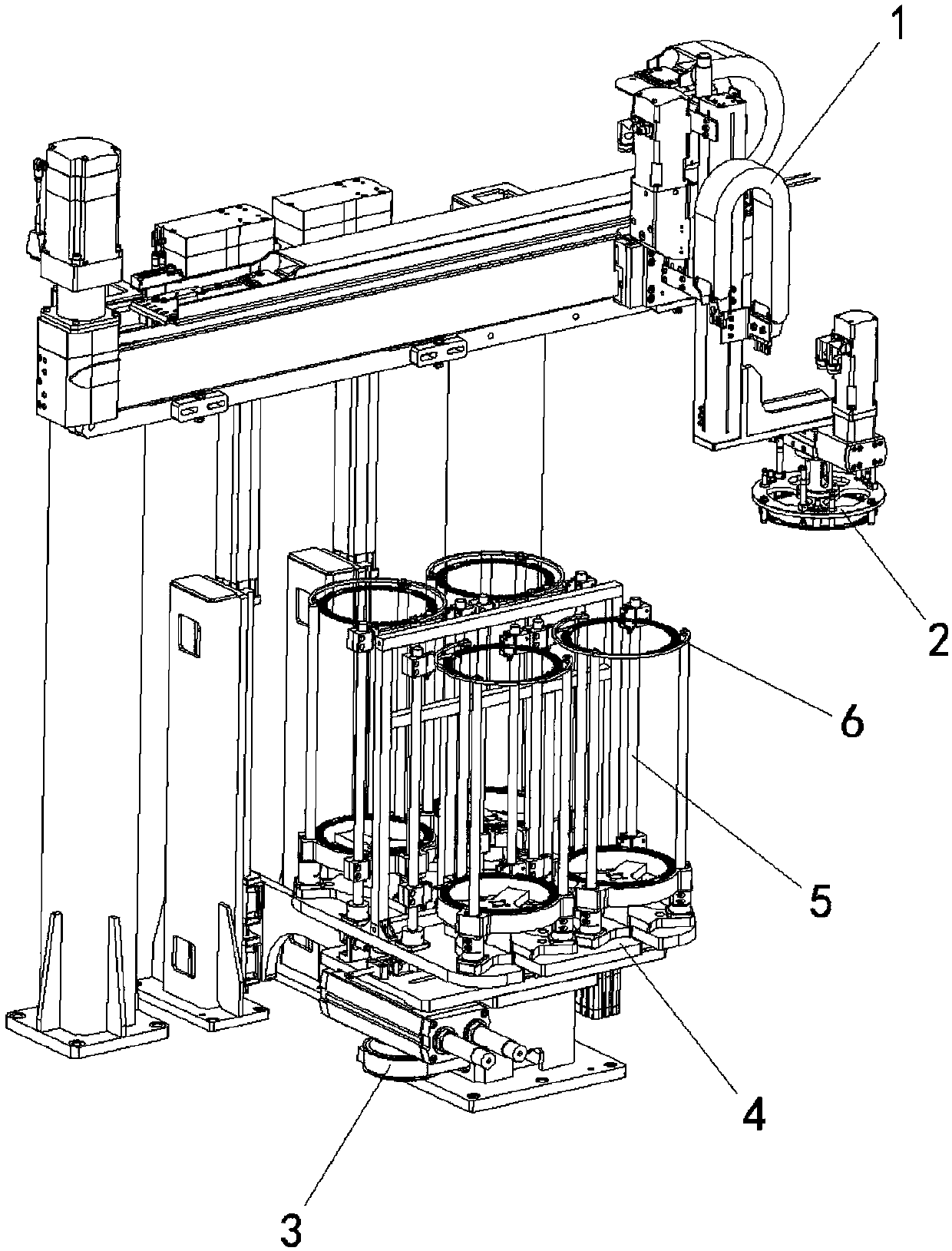
[0036] Such as Figure 1 to Figure 8 As shown, its structural relationship is as follows: it includes each barrel mechanism 5 for storing parts with rough surface flakes, a rotary table mechanism 4 for connecting and driving each barrel mechanism 5 to rotate, and a rotary table mechanism 4 for stepping and advancing rough surface flakes. The stepping mechanism 3 of the parts, the two sides of each barrel mechanism 5 are symmetrically arranged on the rotary table mechanism 4, and also includes the grabbing mechanism 2 for grabbing the rough surface sheet parts and the manipulator that drives the grabbing mechanism t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More