

Multi-UAV (unmanned aerial vehicle) cooperative searching method and system based on path planning and information fusion
A multi-UAV and path planning technology, applied in the field of multi-UAV collaborative search system, can solve the problems of ignoring the dynamic changes of the UAV's own limited environment, difficult to locate the target efficiently, and the failure of target search tasks, etc. Improve the search mechanism, improve the search time and search accuracy, and reduce the effect of flight cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The preferred embodiments of the present invention will be further described in detail below in conjunction with the accompanying drawings.
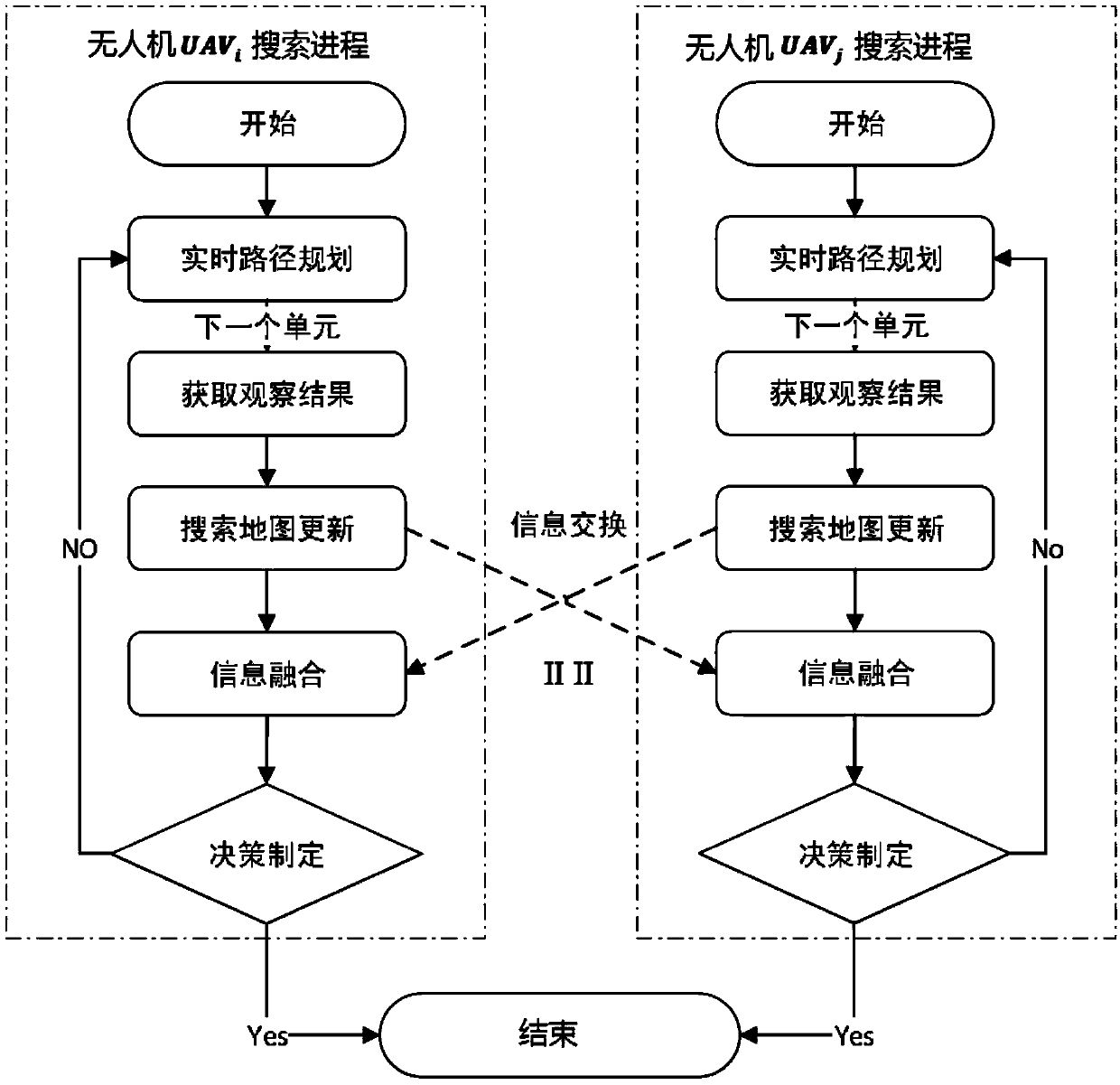
[0026] like figure 1 As shown, this example provides a multi-UAV collaborative search method based on path planning and information fusion, including the following steps:
[0027] In the real-time path planning step, the UAV determines the movement and observation objects at the next moment according to the current map information and the algorithm;
[0028] Search map update step to update probability map and certainty map based on observations;
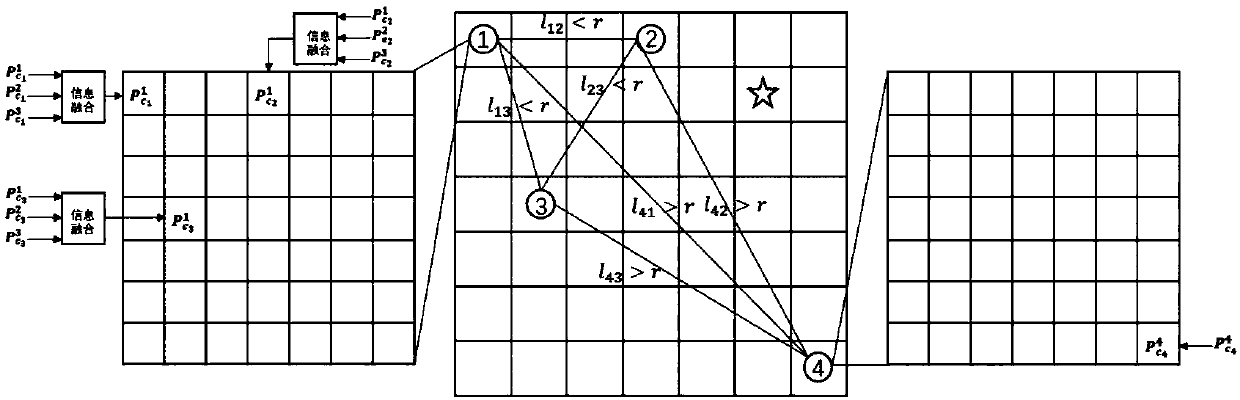
[0029] In the information fusion step, each drone broadcasts its own map information and accepts the map information of other drones, and calculates real-time search map information;
[0030] The decision-making step is to use the updated map information to judge whether the target has the current position of the drone, and then assist decision-making according to the certainty map. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More