AGV control method and system based on inertial navigation error correction and SLAM indoor positioning
An indoor positioning and control method technology, applied in the control/adjustment system, two-dimensional position/channel control, vehicle position/route/height control, etc., can solve the problems of AGV control technology error accumulation and avoid real-time shortage , Avoid the effect of being susceptible to interference and avoiding the accumulation of errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
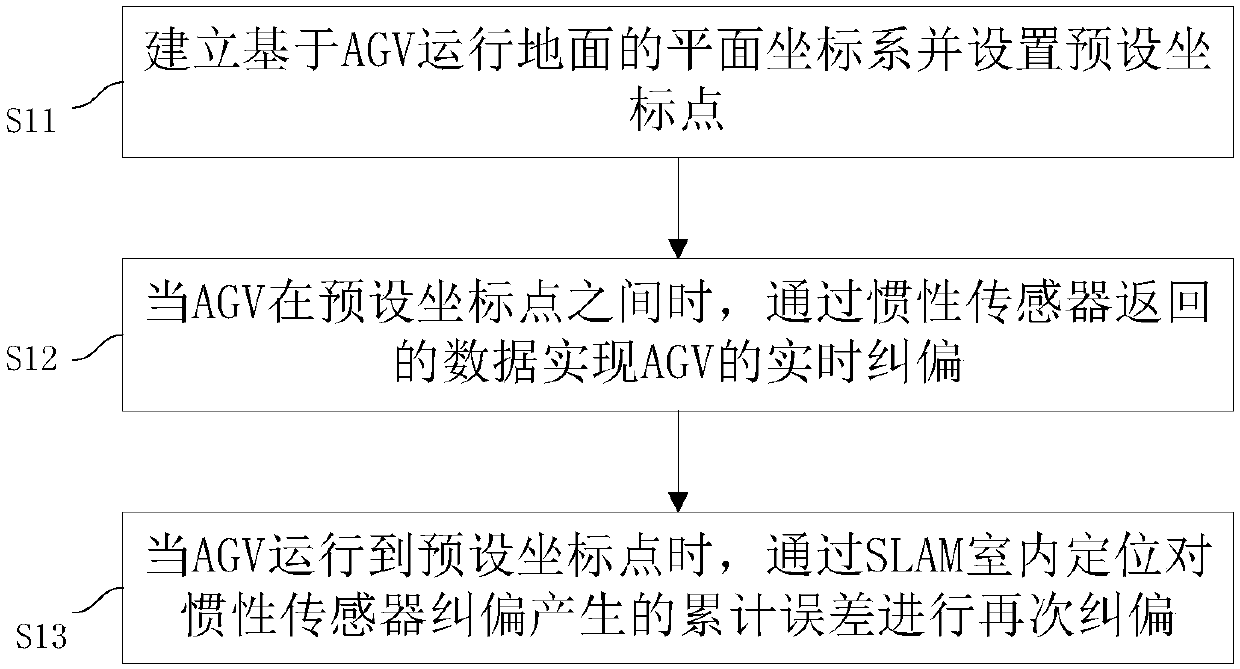
[0059] This embodiment provides an AGV control method for inertial navigation deviation correction and SLAM indoor positioning, such as figure 1 shown, including steps:
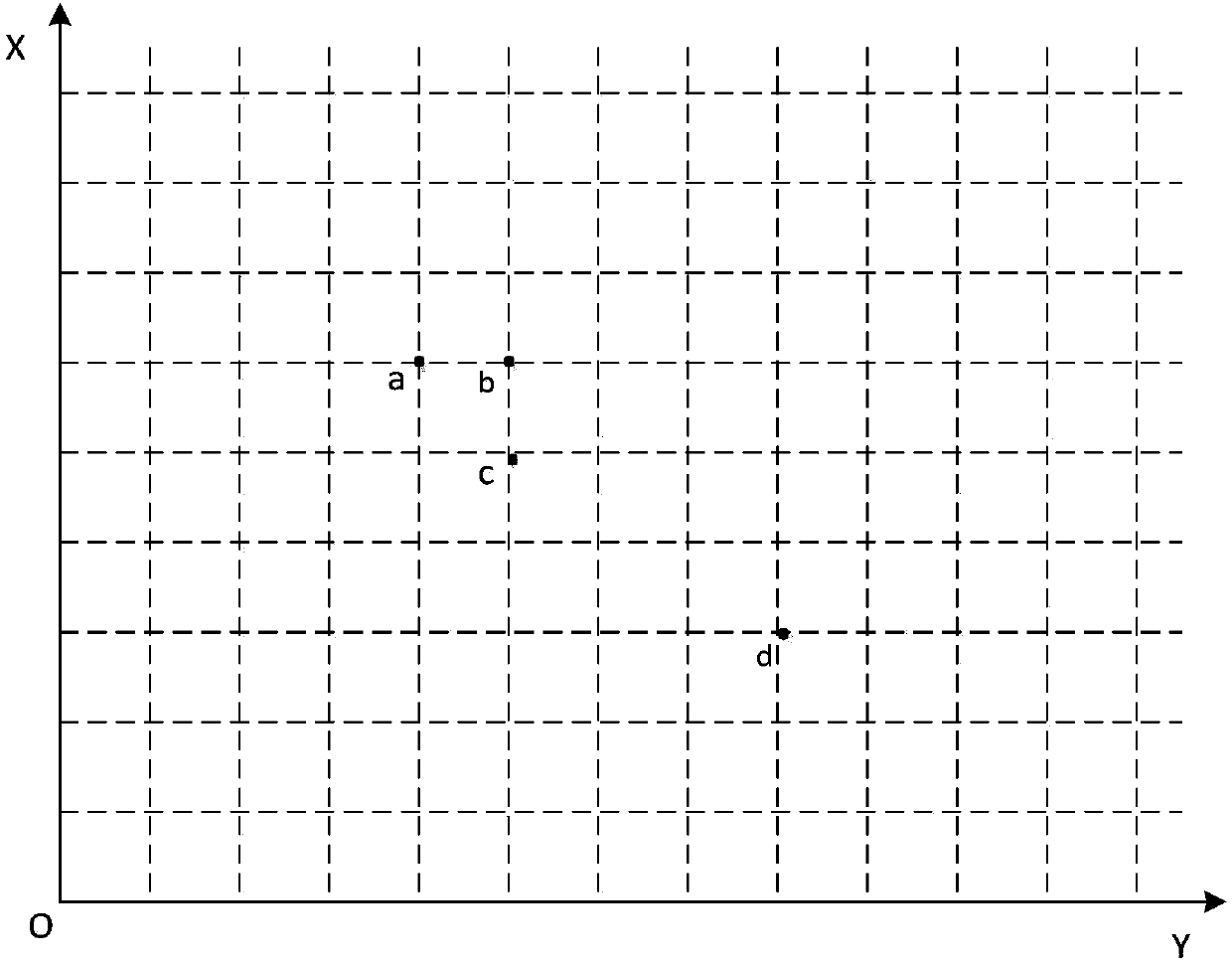
[0060] S11: Establish a plane coordinate system based on the AGV running ground and set preset coordinate points;
[0061] S12: When the AGV is running between the preset coordinate points, the real-time deviation correction of the AGV is realized through the data returned by the inertial sensor;
[0062] S13: When the AGV runs to the preset coordinate point, the cumulative error caused by the inertial sensor correction is corrected again through SLAM indoor positioning.
[0063] The existing technology is mainly used to solve the material transportation of the factory assembly line by AGV through the pre-laid track. When the material delivery point is changed or needs to be changed or a new delivery task is added, Wangwang needs to change the original AGV track , This not only increases the restrictions on...
Embodiment 2
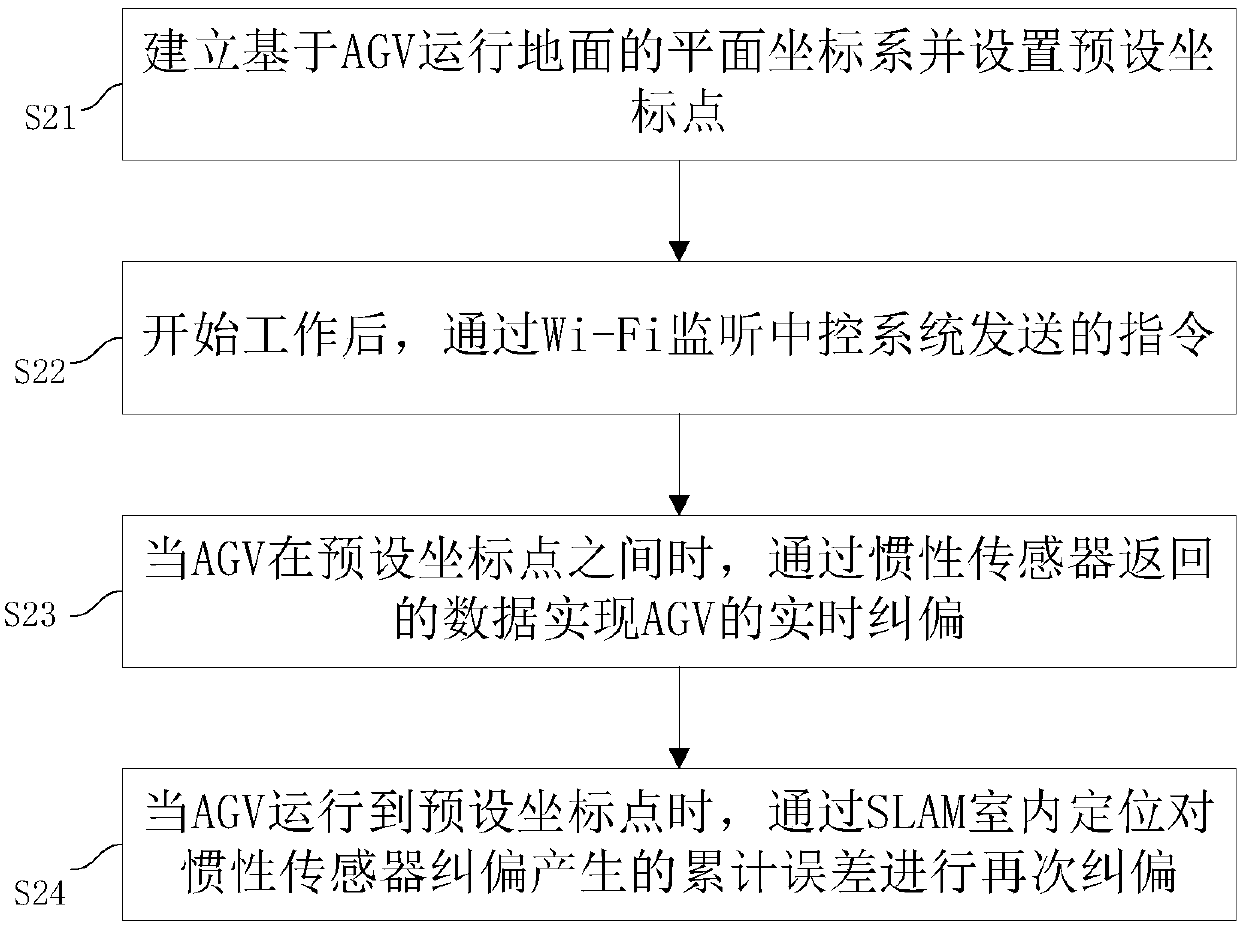
[0091] This embodiment provides an AGV control method based on inertial navigation deviation correction and SLAM indoor positioning, such as image 3 shown, including steps:
[0092] S21: Establish a plane coordinate system based on the AGV running ground and set preset coordinate points;
[0093] S22: After starting to work, monitor the instructions sent by the central control system through Wi-Fi;
[0094] S23: When the AGV is running between the preset coordinate points, the real-time deviation correction of the AGV is realized through the data returned by the inertial sensor;
[0095] S24: When the AGV runs to the preset coordinate point, the cumulative error caused by the inertial sensor correction is corrected again through SLAM indoor positioning.
[0096] The difference from the first embodiment is that step S22 is also included.
[0097] Specifically, when starting to work, the AGV on-board Wi-Fi module turns on the monitoring settings and monitors the instructions...
Embodiment 3
[0099] This embodiment provides an AGV control system for inertial navigation deviation correction and SLAM indoor positioning, such as Figure 4 shown, including:
[0100] Establish module 31, be used for establishing the plane coordinate system based on AGV operation ground and set preset coordinate point;
[0101] The inertial navigation correction module 32 is used to realize the real-time correction of the AGV through the data returned by the inertial sensor when the AGV is running between the preset coordinate points;
[0102] The SLAM positioning module 33 is used to correct the cumulative error generated by the inertial sensor deviation correction again through SLAM indoor positioning when the AGV runs to the preset coordinate point.
[0103]This embodiment adopts inertial navigation and SLAM indoor positioning system as the navigation method of AGV, and realizes the real-time deviation correction of AGV through the value returned by the inertial sensor between two pr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More