

Method for establishing vision/inertia combined navigation model based on time delay filter
An inertial combination and inertial navigation technology, applied in the field of integrated navigation, can solve the problems of lack of navigation accuracy, time synchronization error of integrated navigation, etc., and achieve the effect of solving time synchronization, solving error accumulation, and improving navigation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
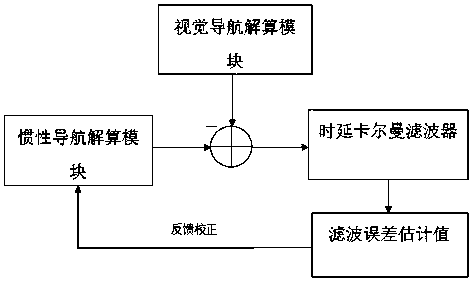
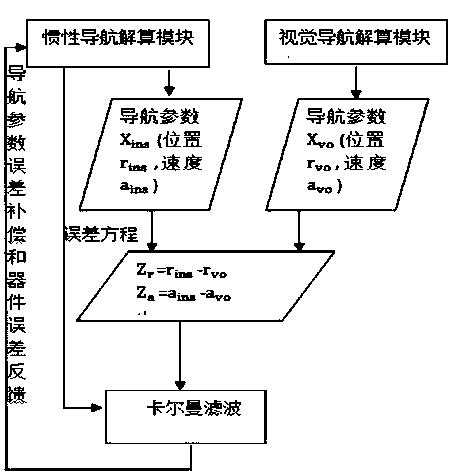
[0020] as attached figure 2 Shown in is that this embodiment builds the step of the integrated navigation model method based on time-delay filter:
[0021] S1. Calculation of inertial navigation system parameters: select the local northeast geographic coordinate system as the navigation coordinate system, the angular velocity of the gyroscope sensitive carrier, and the non-gravity or specific force of the sensitive carrier from the accelerometer, and calculate the carrier’s position through the attitude calculation formula Attitude transformation matrix to obtain the attitude information of the carrier; the navigation calculation formula to obtain the speed of the carrier to the ground and the current position of the carrier;
[0022] S2. Calculation method of visual navigation parameters: firstly, calibrate the camera to obtain the camera imaging model parameters; train the navigation signs through the image processing algorithm, and obtain the mobile robot's motion through ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More