

Underwater crawler-type work robot experiment system
An operation robot and experimental system technology, applied in the field of underwater crawler operation robot experimental system, can solve the problems of lack of design theory and method and evaluation standard, failure to build design calculation mathematical model optimization design method, etc. Walking through performance and continuous operation performance, the effect of optimizing design parameters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
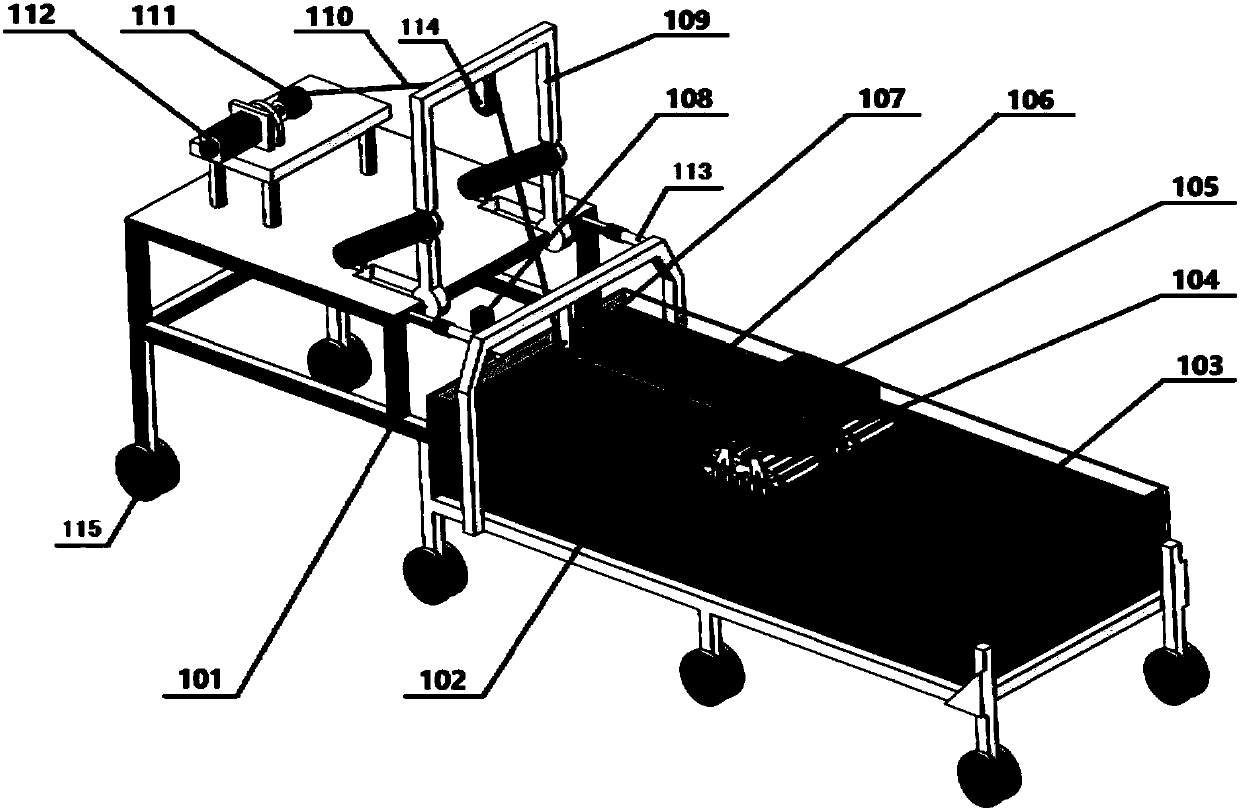
[0016] see figure 1 , the present invention comprises a crawler type model car, a simulated water bottom soil tank, a simulated water bottom bottom, a sensor group, a cable, a traction device and a frame, the simulated water bottom bottom is arranged in the simulated water bottom bottom soil tank, and the crawler model The prototype vehicle is set in the simulated underwater bottom soil tank and walks on the simulated underwater bottom material. The frame is set on one side of the simulated underwater bottom soil tank. The traction device is fixed on the frame and connected to the crawler model model vehicle by cables In order to apply the traction force opposite to the moving direction of the crawler model vehicle, the sensor group is installed at the simulated underwater bottom soil groove and monitors the movement information of the crawler model vehicle.
[0017] In order to simulate the movement under different load conditions, a counterweight platform is fixed on the cra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More