

Laser Stitch Welding Seam Concavity Detection Method Based on Line Structured Light Sensor
A line-structured light and detection method technology, which is applied in the direction of instruments, measuring devices, and optical devices, can solve the problems of inability to meet the production and inspection cycle and low detection efficiency, and achieve low requirements for processing units and good robustness , solving the simple effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
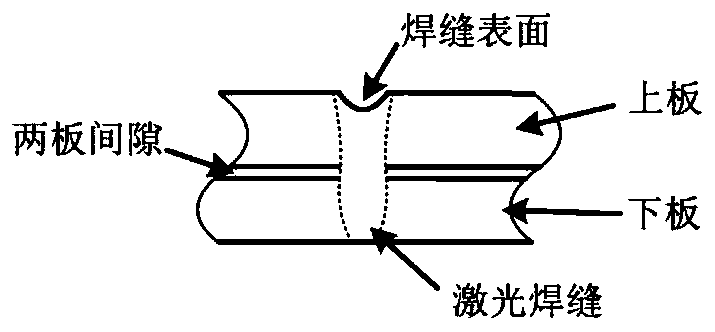
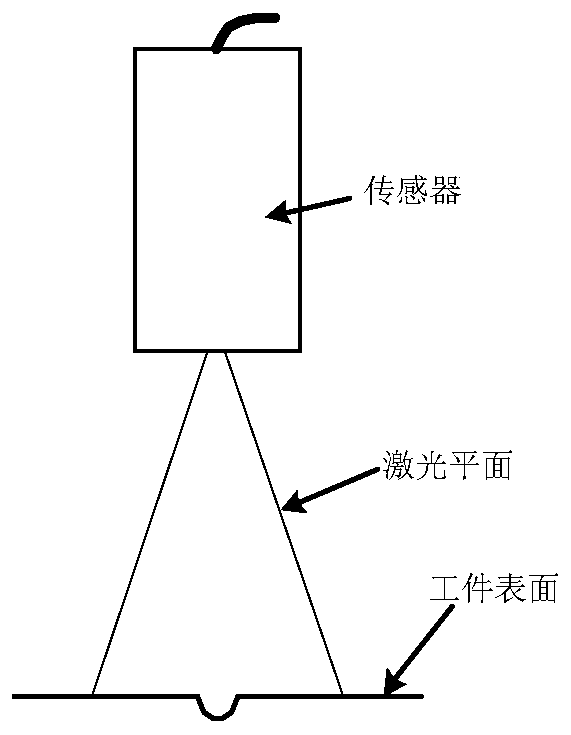
[0032] Specific implementation mode 1. Combination Figure 1 to Figure 6 Describe this embodiment, based on the detection method of the concave amount of the laser stitch welding seam based on the line structured light sensor, when there is a gap between the two plates of the stitch welding joint ( figure 1 As shown), the surface of the weld will be concave, and the amount of the concave will directly affect the performance of the welded joint; figure 2 It is a schematic diagram of scanning with a line-structured light sensor. The laser line is perpendicular to the direction of the weld seam when the optical plane sensor is scanned by the tooling. Its concave amount h( image 3 ) is defined as the vertical distance from the workpiece surface to the bottom of the weld groove.
[0033] In actual measurement, it may appear as Figure 4 , Figure 5 The situation shown should be taken into consideration when designing the detection algorithm. Figure 4 It is shown that the su...
specific Embodiment approach 2
[0050] Specific Embodiment 2. This embodiment is an embodiment of the laser stitch welding seam concave detection method based on the line structured light sensor described in the specific embodiment 1: at a certain moment, a certain laser stitch welding is measured by the line structured light sensor Weld seam, the coordinates of the obtained feature points are P 1 (5,0),P 2 (15,-1),P 3 (15.5,-1.63),P 4 (16,-1), P 5 (26.01,-0.12), the feature point coordinates contain Figure 4 Problems where the surface of the workpiece shown is not parallel to the lower surface of the sensor, and Figure 5 For the non-parallel problem of workpiece surfaces on both sides of the stitch welding seam shown, according to the aforementioned content of the invention (in mm), then
[0051]
[0052]
[0053]
[0054]
[0055]
[0056] h=-0.61
[0057] According to the algorithm, it can be calculated that the concave amount of the laser stitch welding seam at the detection pos...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More