

Accurate modeling method of electromechanical actuation system friction pair
A technology of electromechanical actuation and modeling methods, applied in general control systems, control/regulation systems, electrical digital data processing, etc., can solve problems such as slow convergence speed and inability to adjust
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0067] The present invention will be further described below in conjunction with drawings and embodiments.
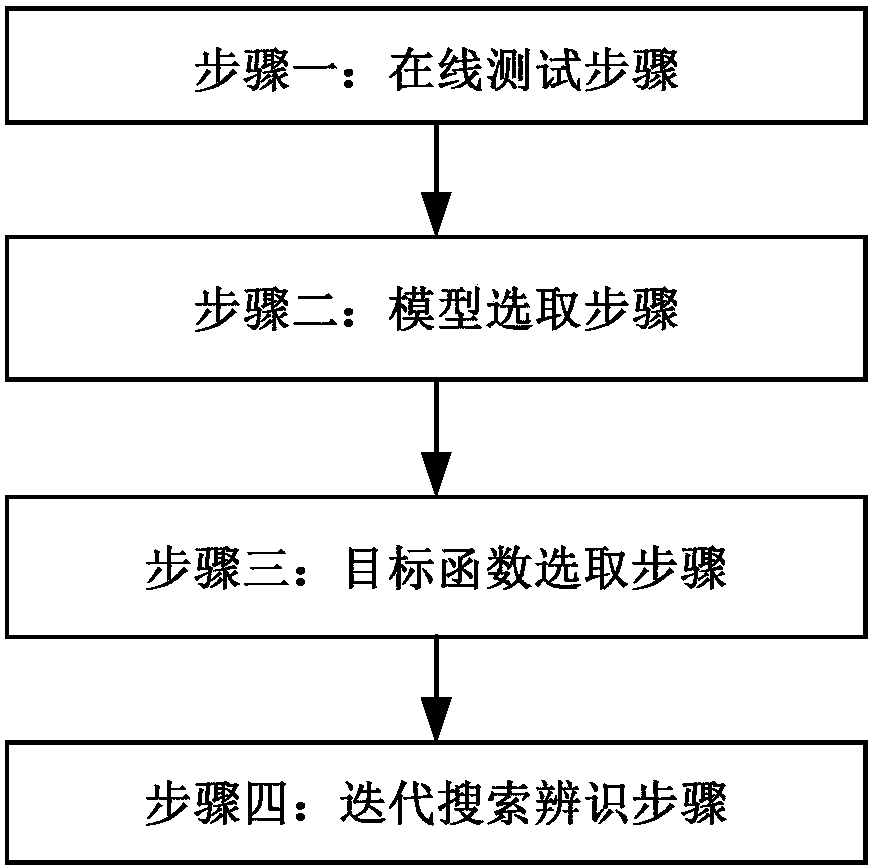
[0068] The present invention is specifically an accurate modeling method for the friction pair of an electromechanical actuating system based on the Stribeck friction model and the simulated annealing genetic algorithm. The flow chart of the steps is as follows figure 1 As shown, it specifically includes the following steps:
[0069] Step 1: Online testing steps. First, make the electromechanical servo system work under constant speed control, and test the corresponding torque at different speeds.
[0070] Step 2: Model selection step. The friction model suitable for the electromechanical servo system is selected, the parameters to be identified are determined according to the selected friction model, and the identification value sequence and identification error sequence of the calculated friction torque are further obtained.
[0071] Step 3: Objective function sele...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More