

Motor rotor position correcting method, device and equipment thereof and storage medium
A technology of motor rotor and storage medium, which is used in the estimation/correction of motor parameters, control of electromechanical transmission devices, electronic commutators, etc. The effect of controlling performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
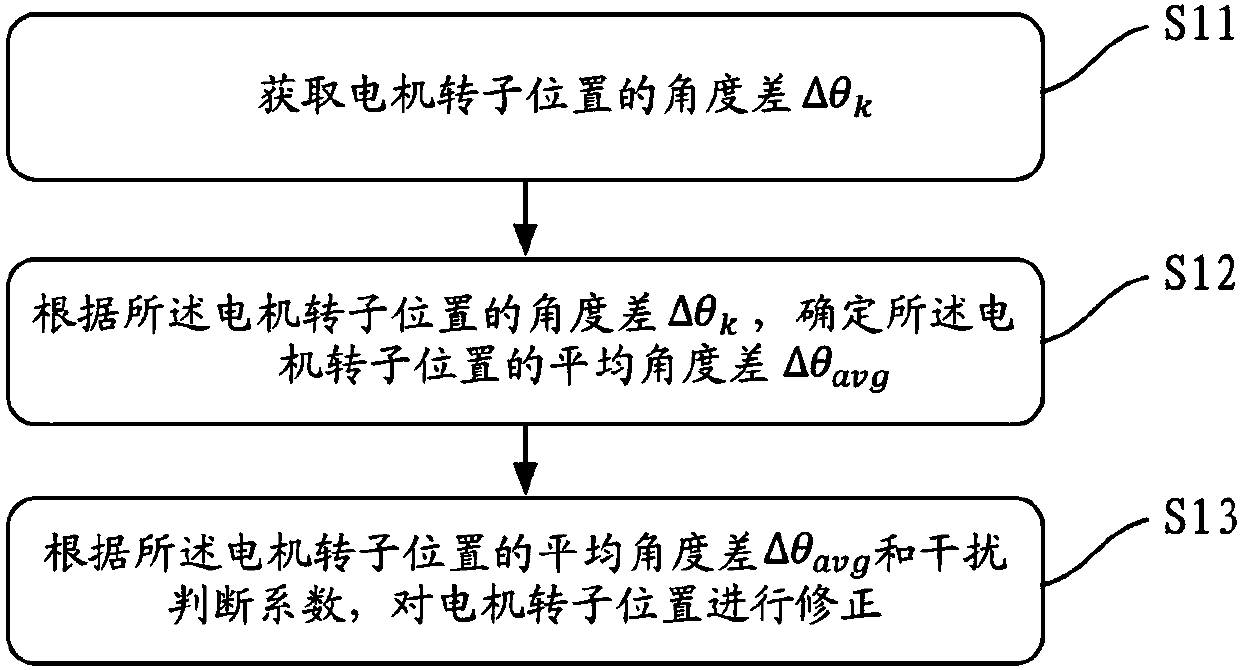
[0029] Such as figure 1 As shown, the first embodiment of the present invention provides a motor rotor position correction method, the method includes steps:
[0030] S11. Obtain the angle difference Δθ of the rotor position of the motor k .
[0031] As an example, by adding a resolver to the permanent magnet synchronous motor and adding a decoder circuit to detect the rotor position of the motor, if θ k Expressed as the angle of the current detected rotor position of the motor, θ k-1 Expressed as the angle of the motor rotor position detected last time, the angle difference Δθ of the motor rotor position k = θ k -θ k-1 . It should be noted that the time interval between the current detection and the last detection is not limited.
[0032] S12, according to the angle difference Δθ of the rotor position of the motor k , to determine the average angular difference Δθ of the rotor position of the motor avg .
[0033] In one embodiment, the angle difference Δθ according ...
no. 2 example
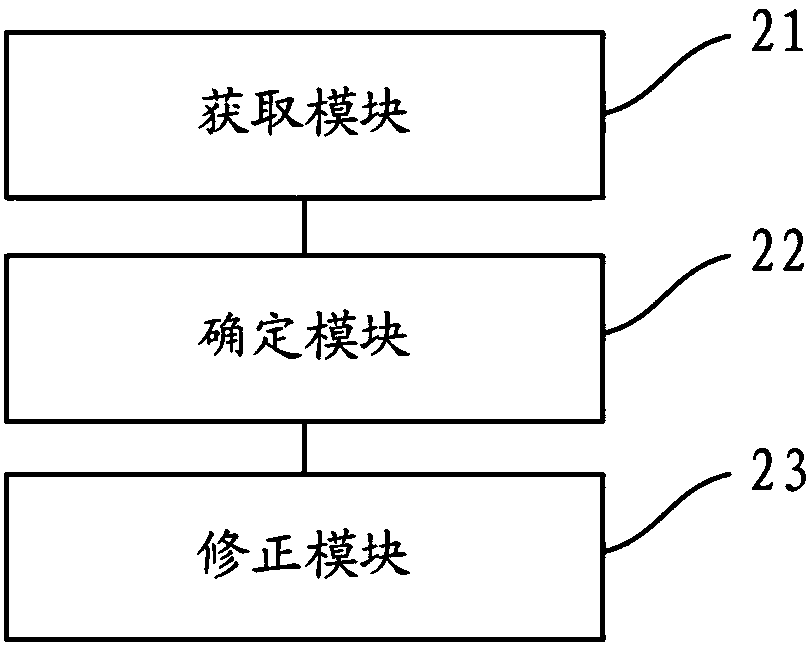
[0060] Such as figure 2 As shown, the second embodiment of the present invention provides a motor rotor position correction device, the device includes an acquisition module 21, a determination module 22 and a correction module 23;
[0061] The obtaining module 21 is used to obtain the angle difference Δθ of the rotor position of the motor k .
[0062] As an example, by adding a resolver to the permanent magnet synchronous motor and adding a decoder circuit to detect the rotor position of the motor, if θ k Expressed as the angle of the current detected rotor position of the motor, θ k-1 Expressed as the angle of the motor rotor position detected last time, the angle difference Δθ of the motor rotor position k = θ k -θ k-1 . It should be noted that the time interval between the current detection and the last detection is not limited.
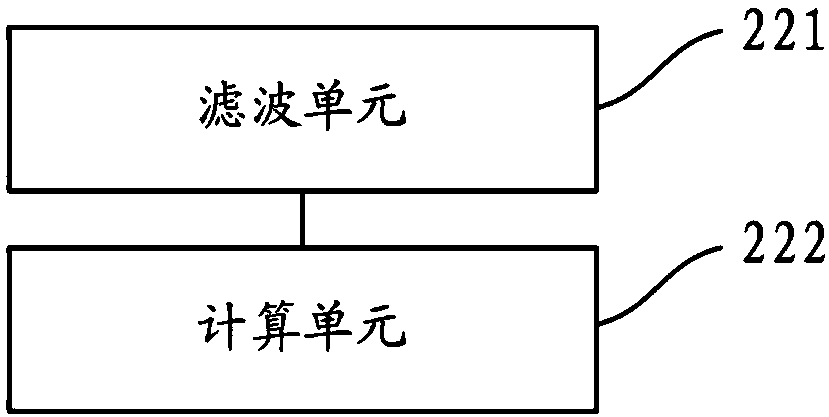
[0063] The determining module 22 is configured to use the angle difference Δθ according to the rotor position of the motor k , to deter...
no. 3 example
[0091] like Figure 5 As shown, the third embodiment of the present invention provides a motor rotor position correction device, which includes: a memory 31, a processor 32, and a motor rotor stored in the memory 31 and operable on the processor 32 A position correction program, when the motor rotor position correction program is executed by the processor 32, it is used to implement the following steps of the motor rotor position correction method:
[0092] Obtain the angle difference Δθ of the rotor position of the motor k ;
[0093] According to the angle difference Δθ of the rotor position of the motor k , to determine the average angular difference Δθ of the rotor position of the motor avg ;
[0094] According to the average angle difference Δθ of the rotor position of the motor avg and the interference judgment coefficient to correct the rotor position of the motor.
[0095] When the motor rotor position correction program is executed by the processor 32, it is also...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More