

Picking robot arm based on adaptive neural network and control method thereof
A neural network control and picking robot technology, which is applied to picking machines, manipulators, program-controlled manipulators, etc., can solve the problems of continuous picking interruption, longer fruit identification and positioning time, and low picking efficiency, so as to reduce invalid operation time and strengthen Acquisition and preprocessing capabilities, control fast and accurate results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The invention aims at realizing fast picking by a picking robot, and studies key issues such as a control method of a picking robot manipulator and a robot visual image noise reduction technology, so as to realize fast picking by a picking robot. Compared with the existing equipment, the control system has better anti-interference and self-learning ability, and can quickly and accurately estimate and compensate the uncertain item f of the model.
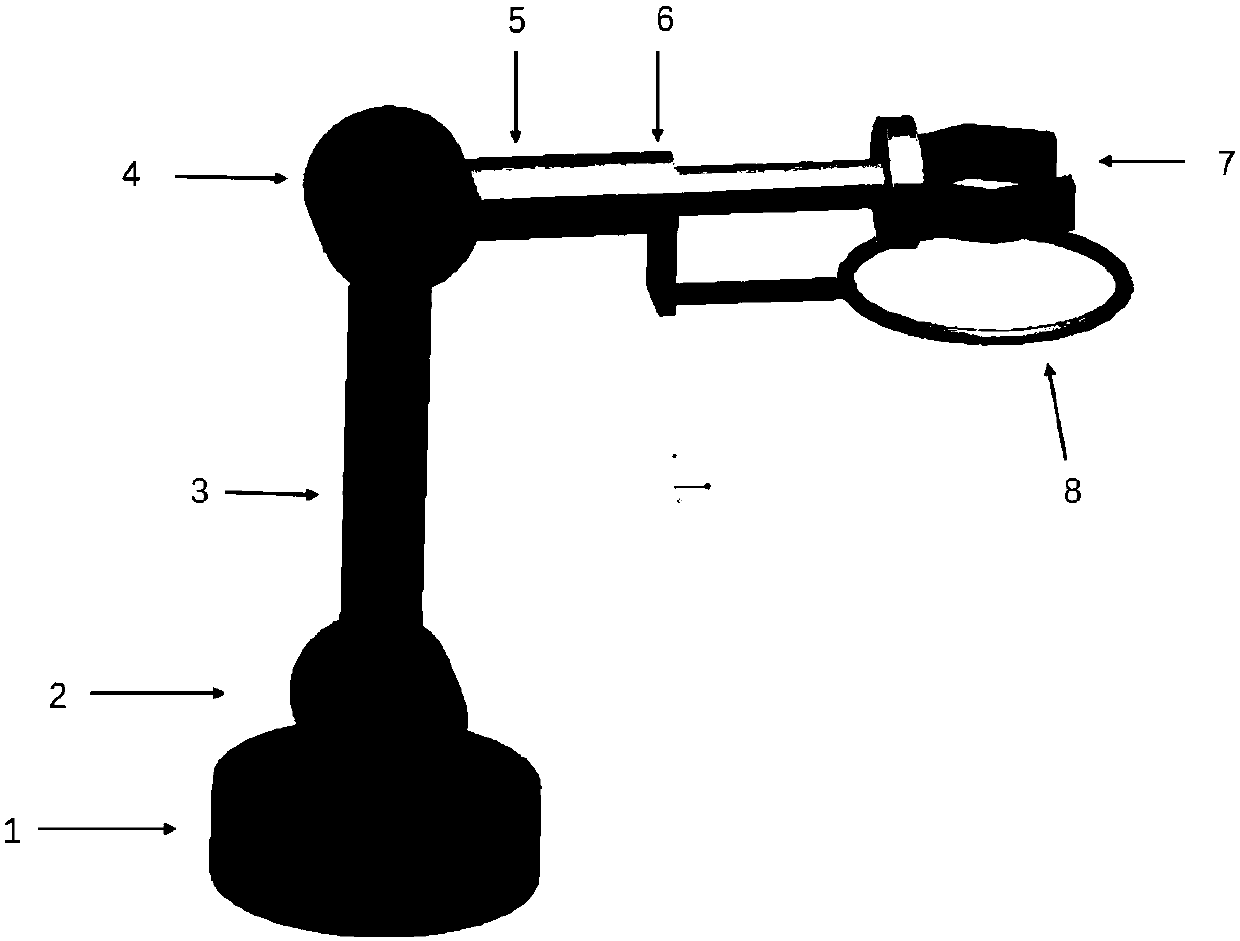
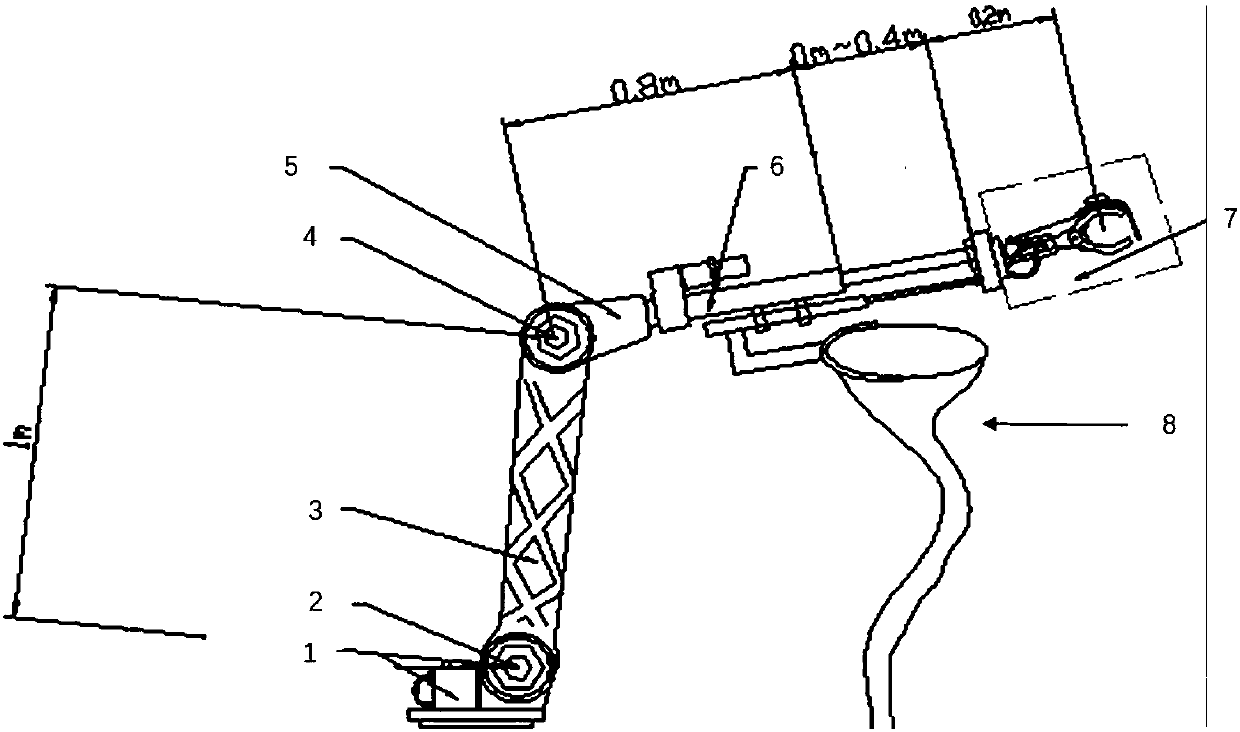
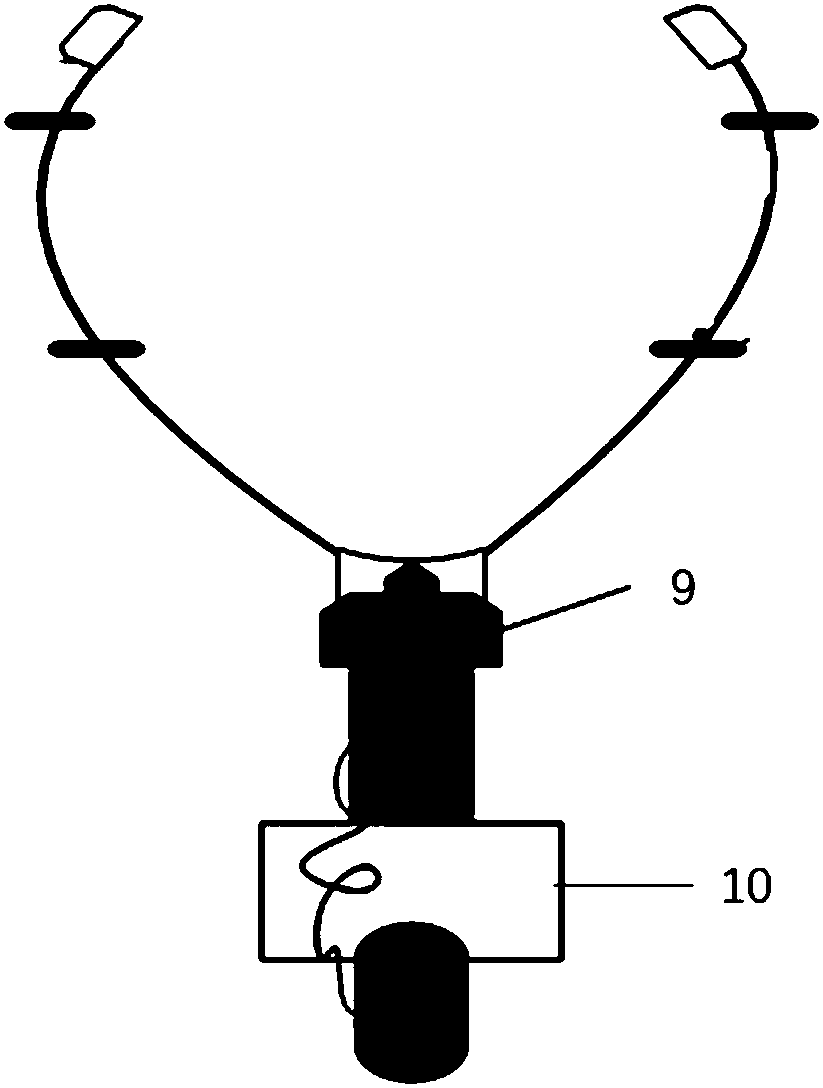
[0041] A kind of picking robot arm and its control method based on self-adaptive neural network of the present invention, its picking robot comprises: walking device, vision system, picking robot arm with end effector and servo control system, wherein vision system is the foundation, mainly It is used to realize the identification and positioning of targets and obstacles; the end effector is the key executive component of the picking robot, and it is a device for avoiding obstacles, realizing fruit picking and other additional ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More