

Gesture control mobile robot remote operation system with auxiliary obstacle avoidance function
A mobile robot, operating system technology, applied in the control/regulation system, non-electric variable control, two-dimensional position/channel control and other directions, can solve the problem of many omnidirectional robot control sensors, poor omnidirectional robot obstacle avoidance effect, The problem of a single user control method can improve the efficiency and effect of obstacle avoidance, optimize the experience of obstacle avoidance, and increase the control experience.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
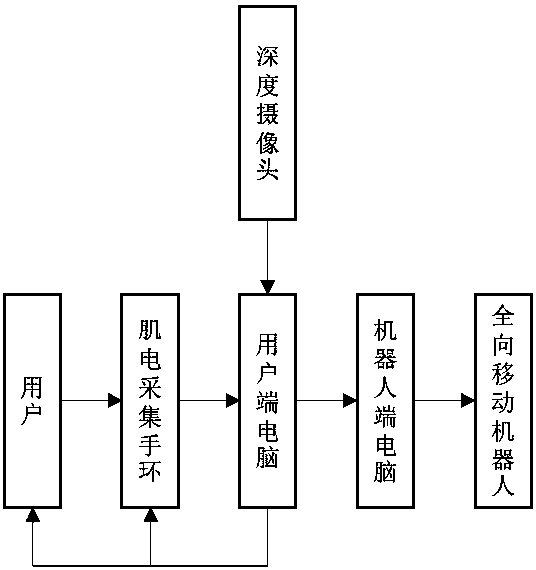
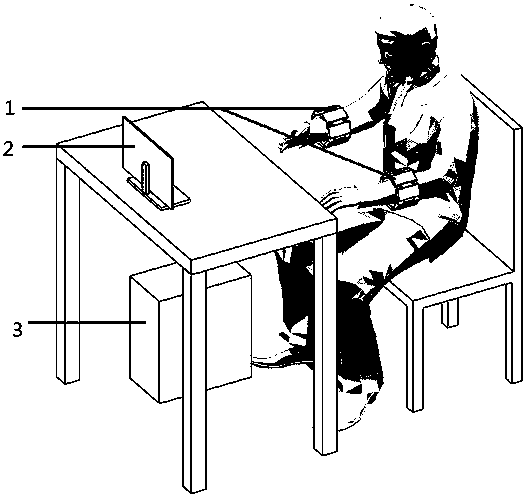
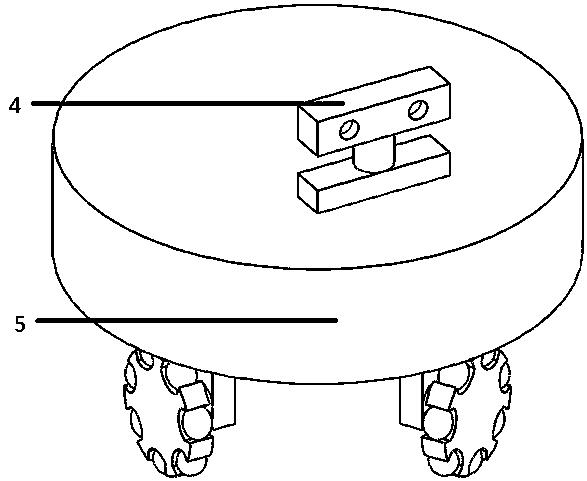
[0037] Attached below figure 1 to attach image 3 And the embodiment further describes the present invention in detail.
[0038] Depend on figure 2 , 3 As shown, a gesture-controlled mobile robot teleoperation system with auxiliary obstacle avoidance function consists of a myoelectric collection bracelet (1), a user-end computer visual feedback device (2), a user-end computer host (3), a depth camera (4 ), an omnidirectional mobile robot (5)
[0039] like figure 1 As shown in the flow chart, the user uses the client computer visual feedback device (2) to watch the environment image around the omnidirectional mobile robot (5) collected by the depth camera (4). According to the image, the myoelectric collection bracelet (1 ) to control the movement of the omnidirectional mobile robot (5). When the depth camera (4) detects that the distance of an obstacle is lower than the maximum safe distance, the EMG collection bracelet (1) will remind the user to avoid obstacles through ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More