

Deformable mirror iteration control method and system based on multi-element linear regression
A multiple linear regression and iterative control technology, applied in the optical field, can solve the problems of low function accuracy, low measurement accuracy, neglecting actuator coupling, etc., and achieve the effect of precise control and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
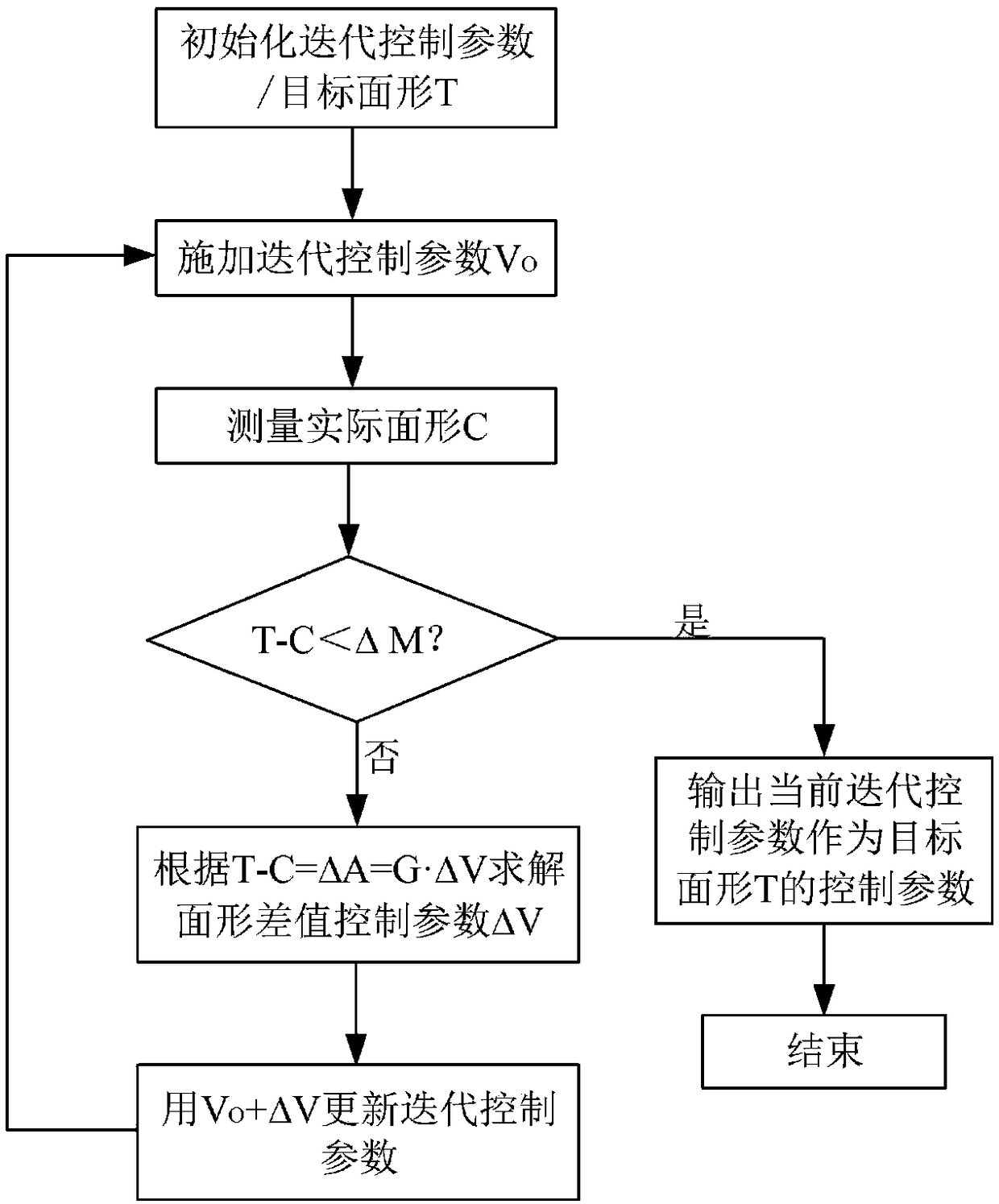
[0023] The specific embodiment of the present invention provides a kind of deformation mirror iterative control method based on multiple linear regression, comprises the step of solving the control parameter of target surface shape, and the step of described control parameter of solving target surface shape comprises S1 to S4:
[0024] S1, applying multiple groups of different random control parameters to the deformable mirror, and recording the corresponding surface shape Zernike coefficient vector of the deformable mirror in real time; based on the influence function matrix, control parameters and surface shape Zernike coefficient vector of the deformable mirror (or called "Zernike coefficient vector") relationship between the three, using the multiple groups of different random control parameters and corresponding multiple surface shape Zerni...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More