

Dexterous hand based on myoelectric control
A myoelectric control and dexterous hand technology, applied in the field of dexterous hands, can solve problems such as single movement form, limitation of dexterous hands, lack of flexibility, etc., to achieve the effect of expanding the application range and increasing the movement form
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be further described below in conjunction with accompanying drawing and embodiment.
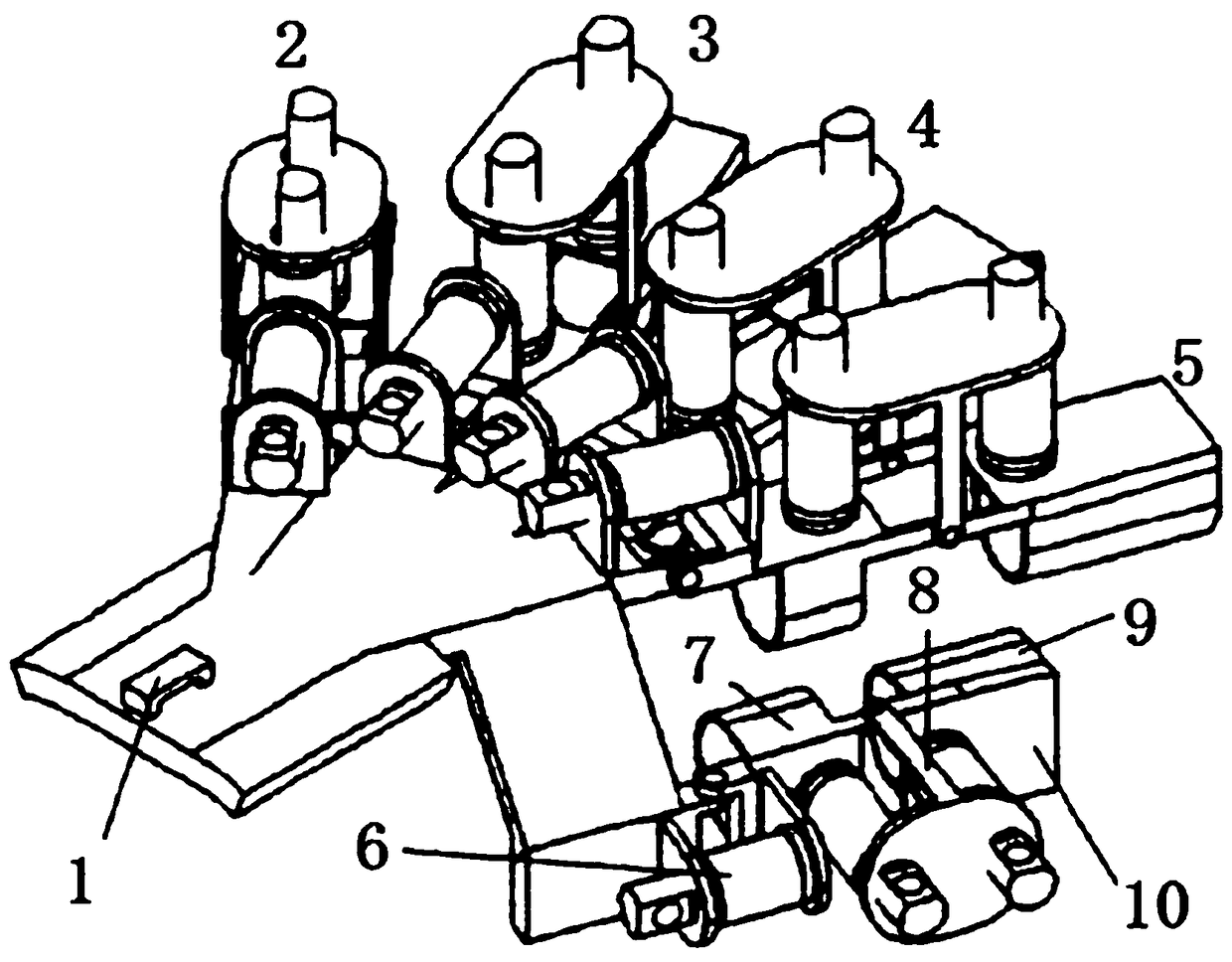
[0015] Such as figure 1 , a pneumatic flexible actuator FPA, restricts the axial deformation of the rubber tube by embedding a steel wire inside the rubber tube. The main component of the pneumatic flexible actuator FPA is two layers of elastic rubber tubes, and then the vulcanized spring is embedded in the middle of the rubber tube wall. Its working principle is: connect the air pump to the pipe joint on the FPA end cap, then fill the inner cavity of the FPA with gas and compress it. When the air pressure in the inner cavity rises, the rubber tube will expand around. However, due to the axial constraint of the spring in the tube wall, the rubber tube can only be elongated and deformed in the axial direction; when the air pressure in the inner cavity decreases, the elastic action of the rubber tube and the spring will return it to its original state.
[001...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More