

Attitude and heading information fusion method based on linear Kalman filtering
A Kalman filter and fusion method technology, applied in the field of robot SLAM, can solve the problems of transition convergence, difficult to analytically obtain the partial derivative of the state vector, and a large amount of calculation, so as to achieve the effect of adjusting the proportional coefficient in real time and avoiding transition convergence.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0043] The present invention will be further described below in conjunction with specific embodiments.
[0044] A low-end IMU chip MPU6050 is used on the sweeping robot. The data output adopts the IIC interface. The main control CPU adopts the Linux operating system. The IMU data is collected regularly with a 10ms clock, and the attitude algorithm is run regularly with a 10ms cycle.
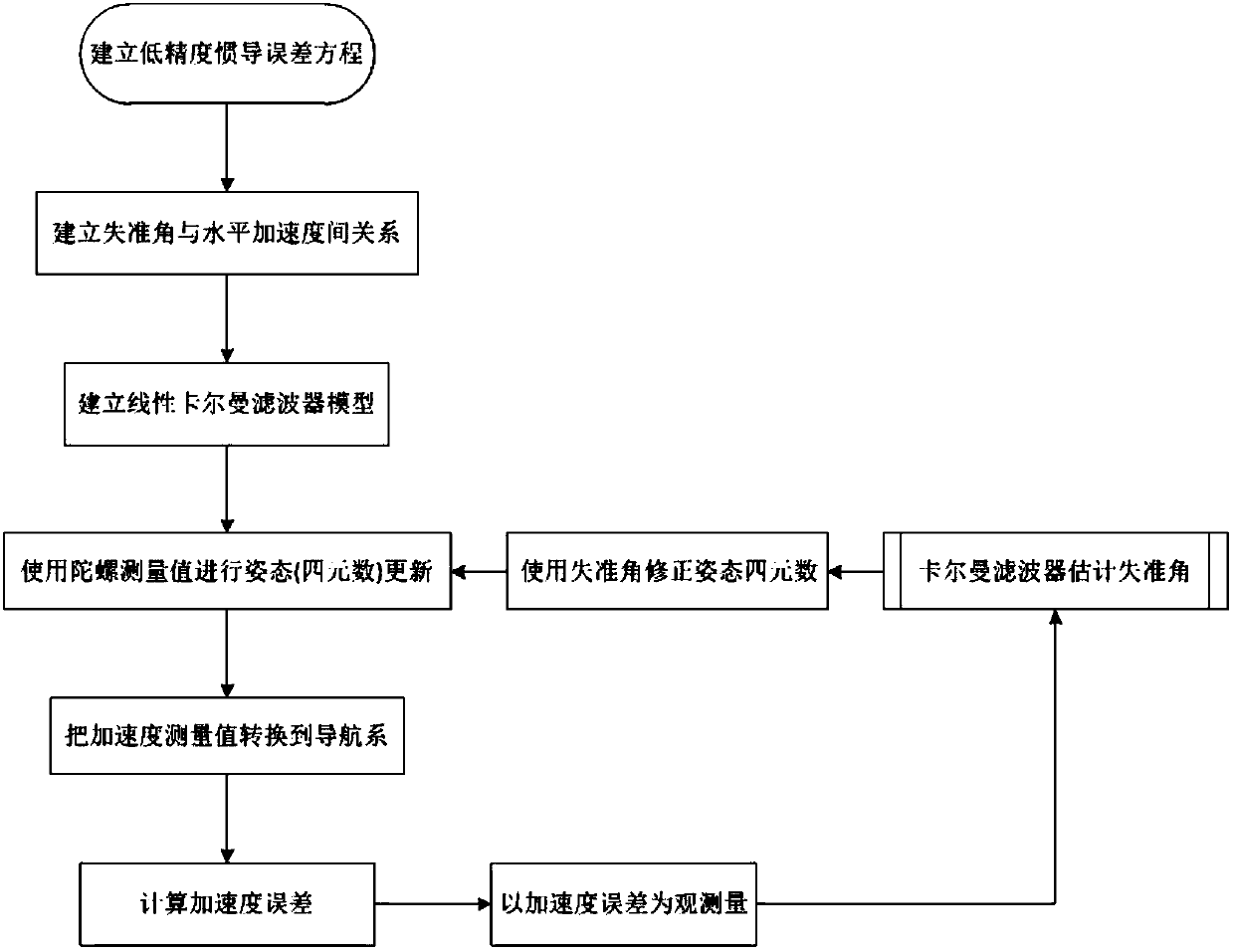
[0045] A kind of attitude information fusion method based on linear Kalman filtering, the method comprises the following steps: as attached figure 1 as shown,
[0046] Step 1: Establish the error equation of the low-precision inertial navigation system, the formula is as follows:
[0047]
[0048]
[0049]
[0050] Among them, w ε and w ▽ are gyroscope angular rate white noise and accumulative specific force white noise, respectively, and are the first-order Markov process random errors of the gyroscope and accelerometer, respectively, as follows:
[0051] and
[0052] τ Gi a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More