

Electrical characteristics-considered motor servo system asymptotic stability control method
A servo system and control method technology, applied in the direction of single motor speed/torque control, control purpose model/simulation, etc., can solve problems such as sliding mode surface chattering, system instability, and damage to the good performance of the system to achieve enhanced The effect of robustness, avoidance of chattering problems, good tracking performance and parameter identification ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0111] In order to assess the performance of the designed controller, the following parameters are taken in the simulation to model the motor system: J=6.9kg m 2 , k i =0.05N·m / A, B=0.53N·m·s / rad, L=1.6H, R=1.56Ω, k b =19.7N·m / (r·min -1 ), d n =-0.01N m, f(t)=0.07sintN m; take ARC controller parameter k 1 =72,k 2 =16.3,k 3 =4.2,kn = 1, δ f =0.1N·m, θ min =[50,0,-1] T , θ max =[150,20,1] T , Г=diag{100,15,6}, δ(t)=3000 / (t 2 +1); Take the PID controller proportional coefficient k p =105, integral coefficient k i =24, differential coefficient k d = 0.9.
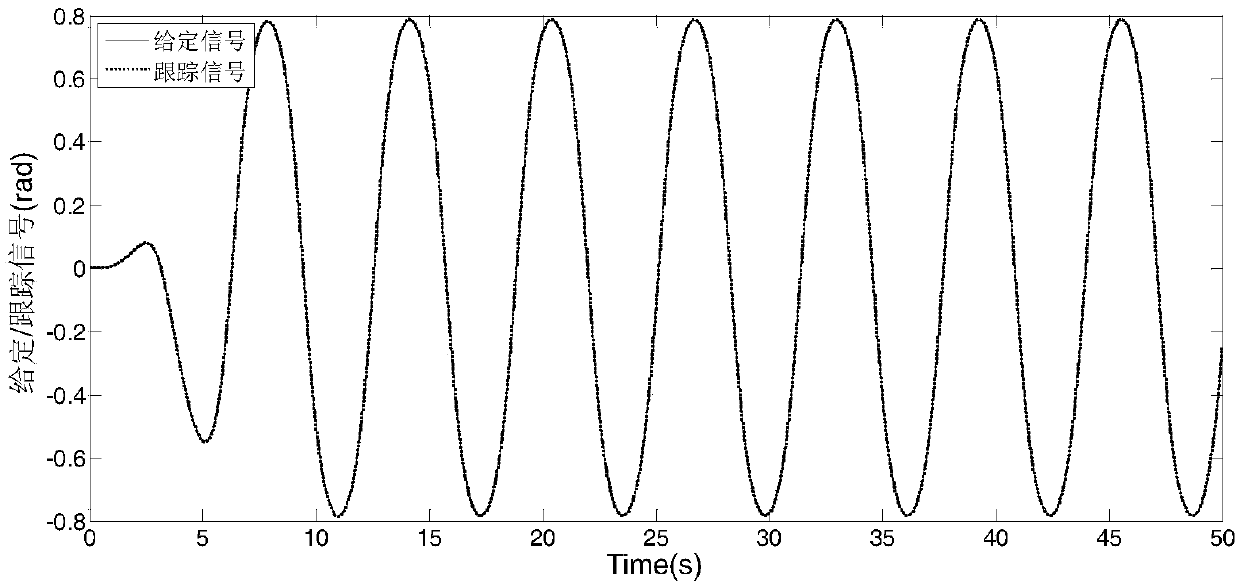
[0112] The given position reference signal is x 1d =0.8sin(πt)[1-exp(-0.01t 3 )].
[0113] The attached picture of the control effect is as follows:
[0114] image 3 It is a schematic diagram of the tracking process of the system output to a given reference signal under the control of the ARC controller, Figure 4 is the curve graph of the system tracking error changing with time under the action of the ARC ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More