

Fault detection method of unmanned aerial vehicle flight control system
A flight control system and fault detection technology, which is applied in general control systems, control/regulation systems, test/monitoring control systems, etc., and can solve problems such as reducing the computational complexity of fault detection.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0194] The invention takes the scanning eagle unmanned aerial vehicle as an example to detect the deviation fault and slope gradient fault of the sensor and the actuator. The body and aerodynamic parameters of the UAV are given in Table 1, where the aerodynamic coefficient and aerodynamic moment coefficient are obtained by linear interpolation on the basis of the data obtained from the UAV wind tunnel experiment.
[0195] Table 1 UAV body parameters
[0196]
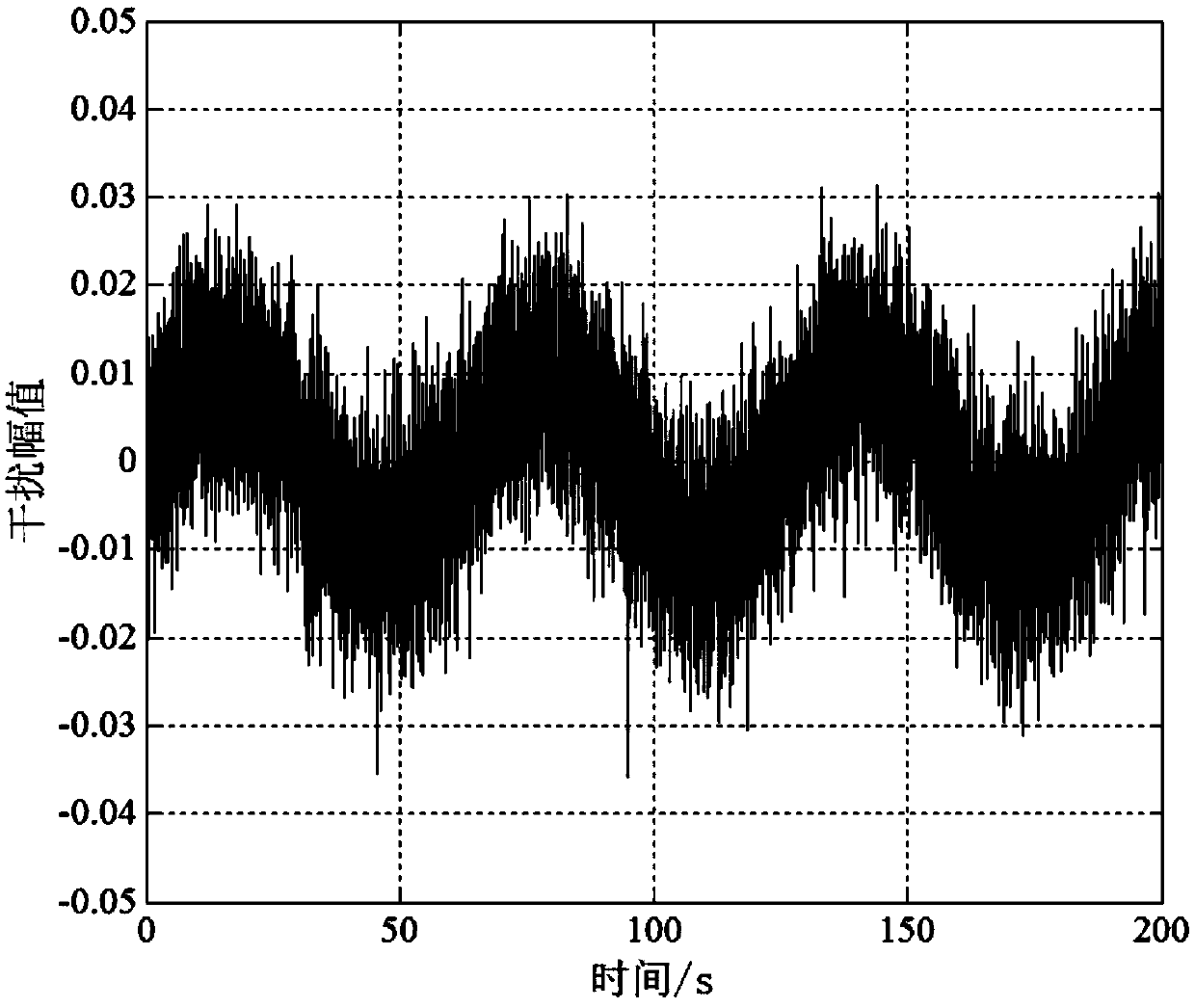
[0197] In addition, the flight speed of the simulated UAV is 24m / s, the flight altitude is 200m, and the flight time is 200s. The external noise is "sine noise + white noise" l 2 Norm-bounded disturbances, such as image 3 As shown, the amplitude of the sinusoidal noise is 0.01, and the period is 0.1rad / s; the mean value of the white noise is 0, and the variance is 0.01; the pitot fault and the elevator fault are selected for detection in this embodiment. Among them, pitot faults are mostly partial blockage, surfac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More