

Three-dimensional point cloud-based patrol robot vision system and control method
A technology of inspection robot and three-dimensional point cloud, which is applied to the parts, transmission system, and signal transmission system of the TV system, which can solve problems such as failure to work and impact on the quality of inspection work, and achieve the effect of improving matching accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
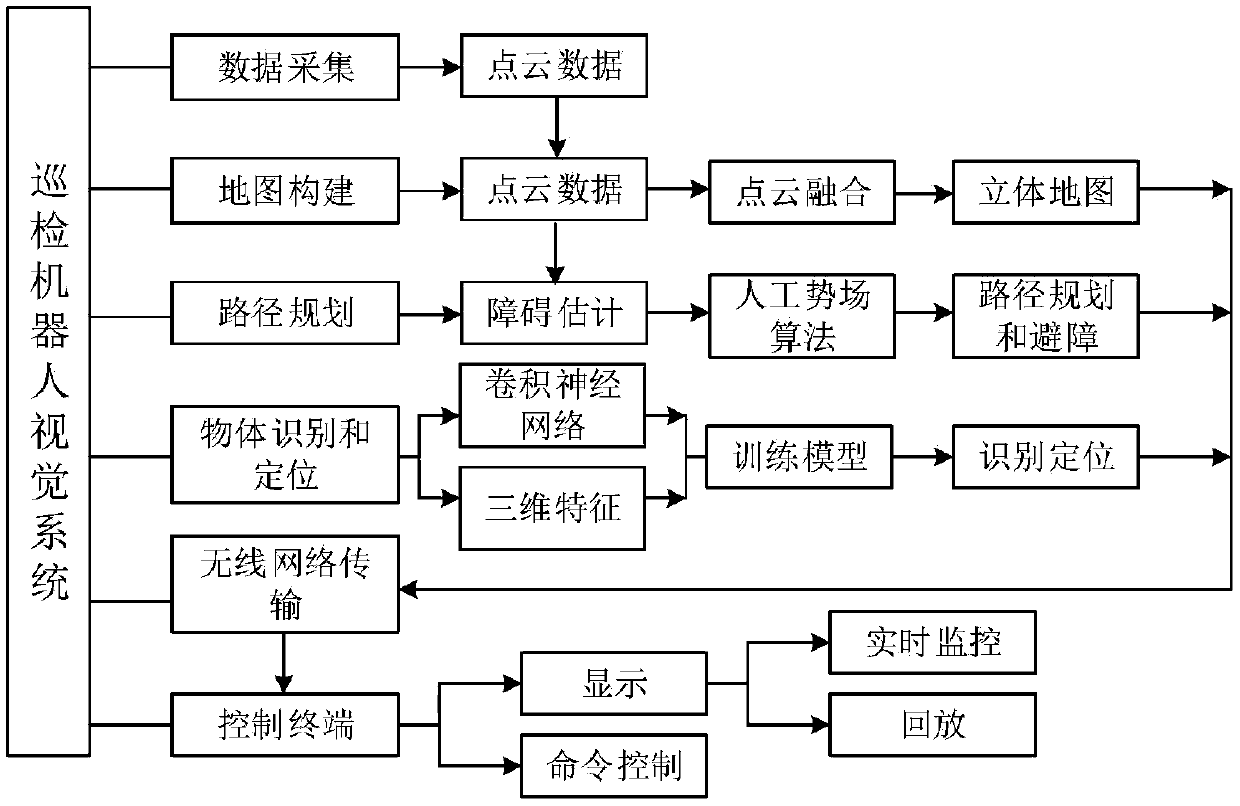
[0064] refer to figure 1 , a three-dimensional point cloud-based inspection robot vision system of the present invention includes a data collection module, a map construction module, a path planning module, a target recognition and positioning module, a wireless network transmission device, and a control terminal.
[0065] The data acquisition module is composed of an RGBD camera and is used to collect point cloud data of the inspection environment. The RGBD camera can collect 360 o View point cloud data, and can simultaneously collect RGB image data and depth data;
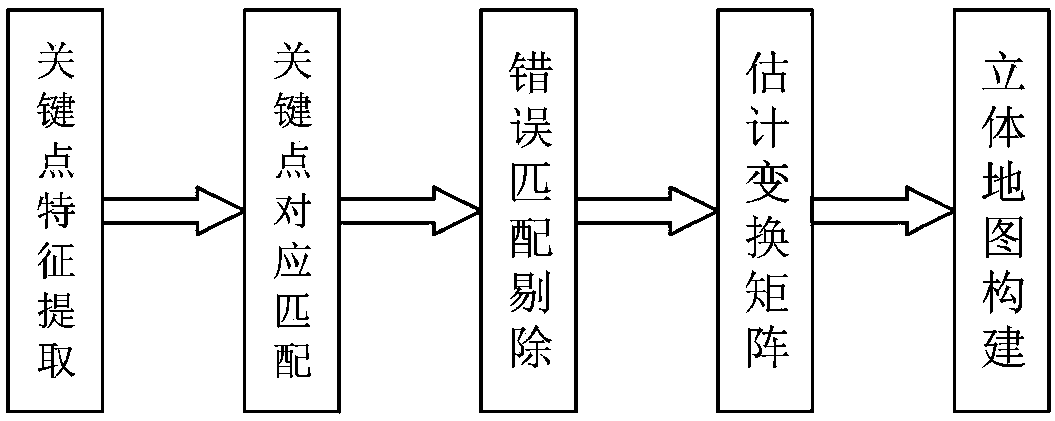
[0066] The map construction module receives the point cloud data obtained by the data acquisition module, and is used to construct a three-dimensional map of the inspection environment.
[0067] The path planning module receives the point cloud data acquired by the da...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More