

Robot dual peg-in-hole assembling method utilizing genetic evaluative algorithm based on learning
An assembly method and an evolutionary algorithm technology, applied in the direction of instruments, manipulators, general control systems, etc., can solve problems such as unavailable, impossible to optimize the robot assembly process, high robustness, etc., to avoid local minimum problems, avoid maintenance Eliminate catastrophe problems and improve assembly process performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The method for assembling the biaxial hole of a robot based on the learning genetic evolution algorithm proposed by the present invention comprises the following steps:
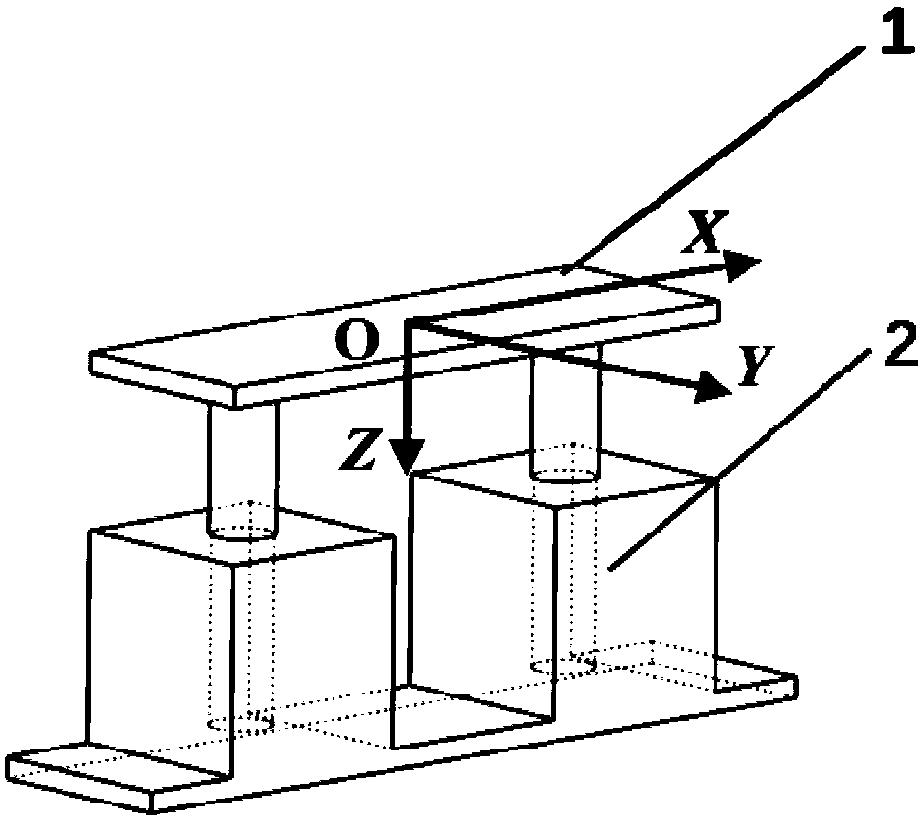
[0035] (1) Establish a three-dimensional coordinate system X-Y-Z on the dual-axis hole to be assembled, and its coordinate origin O is located at the midpoint of the line connecting the two axis circle centers on the upper surface of the shaft to be assembled, the positive direction of the Z axis is downward along the axis of the shaft, and the positive direction of the X axis In order to point the center of the left axis to the center of the right axis, use the right-hand spiral rule to get the positive direction of the Y axis; figure 1 shown in .
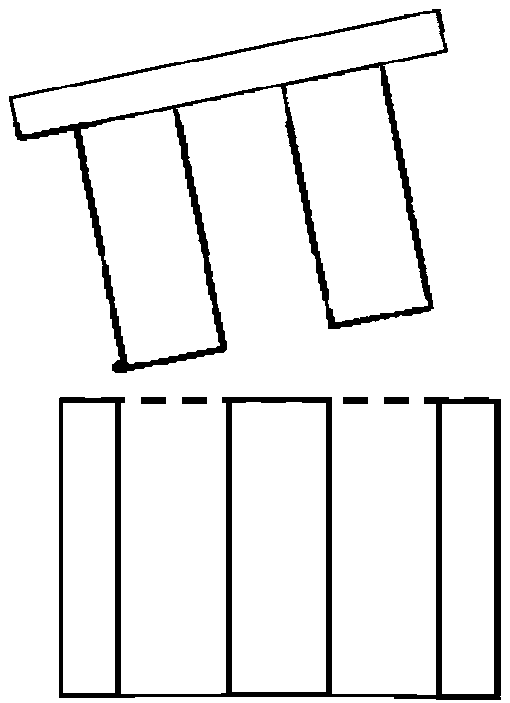
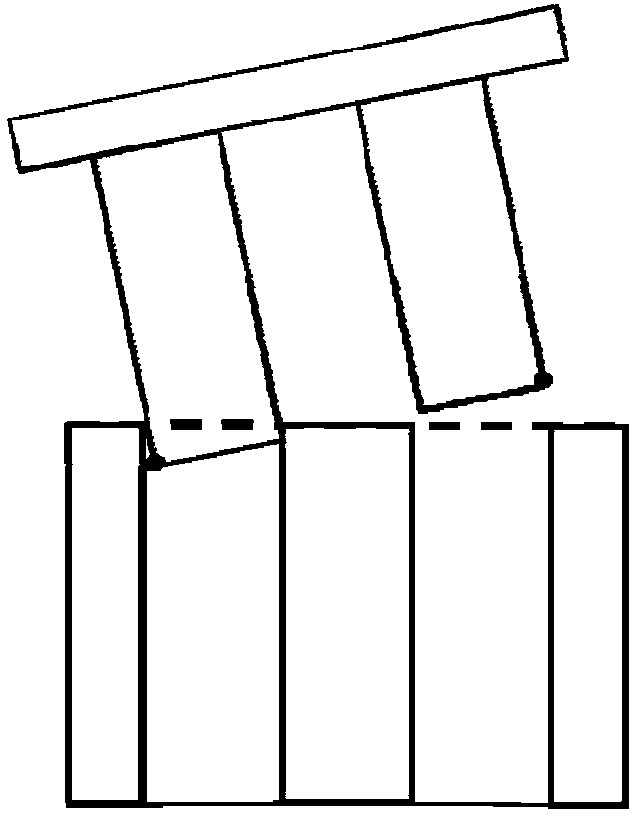
[0036](2) Divide the assembly process of the biaxial hole into a free state (such as figure 2 shown), contact state (such as image 3 shown) and pairing status (as Figure 4 shown), for figure 1 The spatial analysis of the contact state and the three-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More