

Underactuated lightweight human-simulated five-finger dexterous hand
An underactuated, dexterous hand technology, applied in the field of bionic robots, can solve the problems of large structure, complex control, and bulky shape, and achieve the effect of high structural integration, high control integration, flexible and light fingers
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
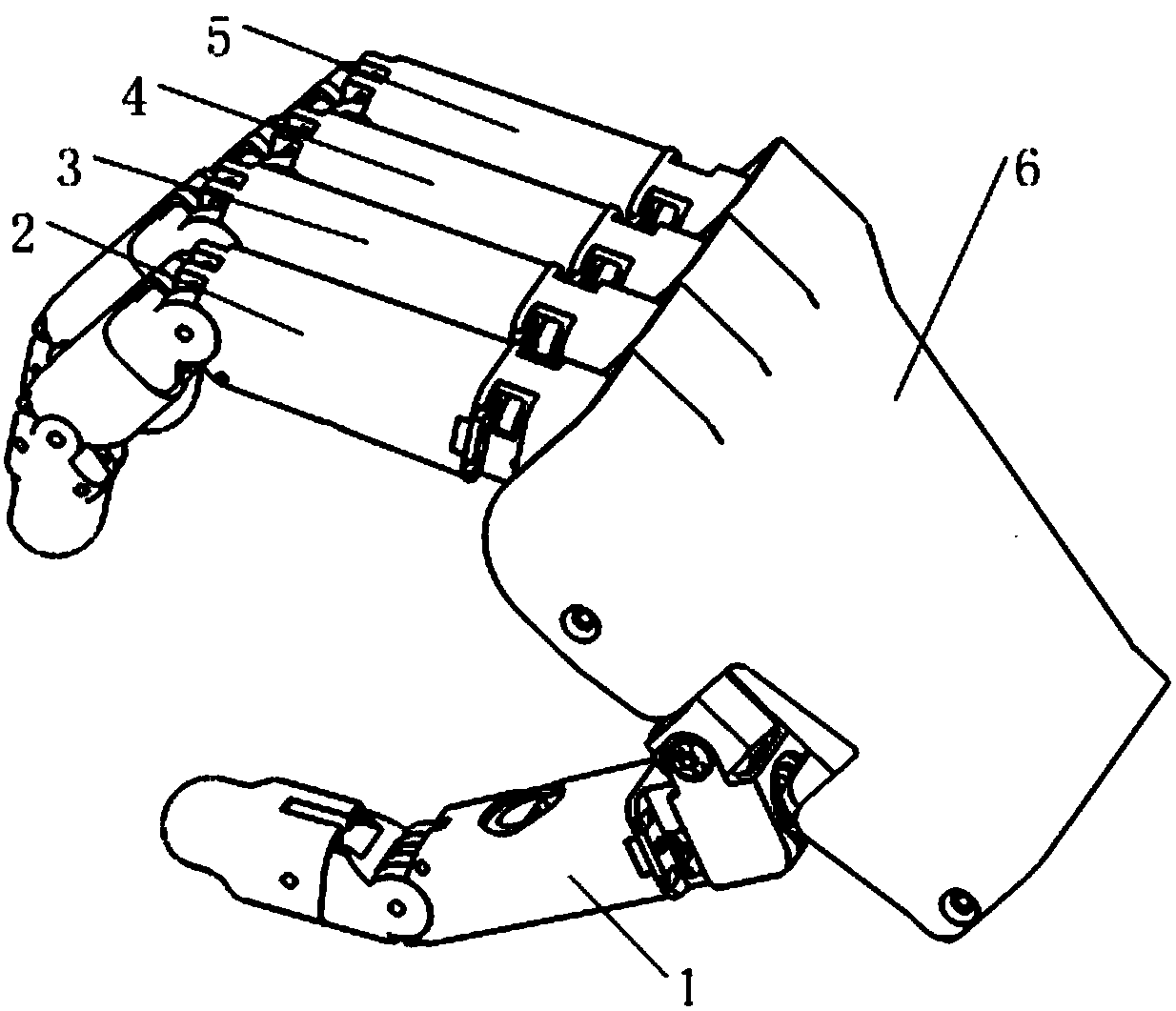
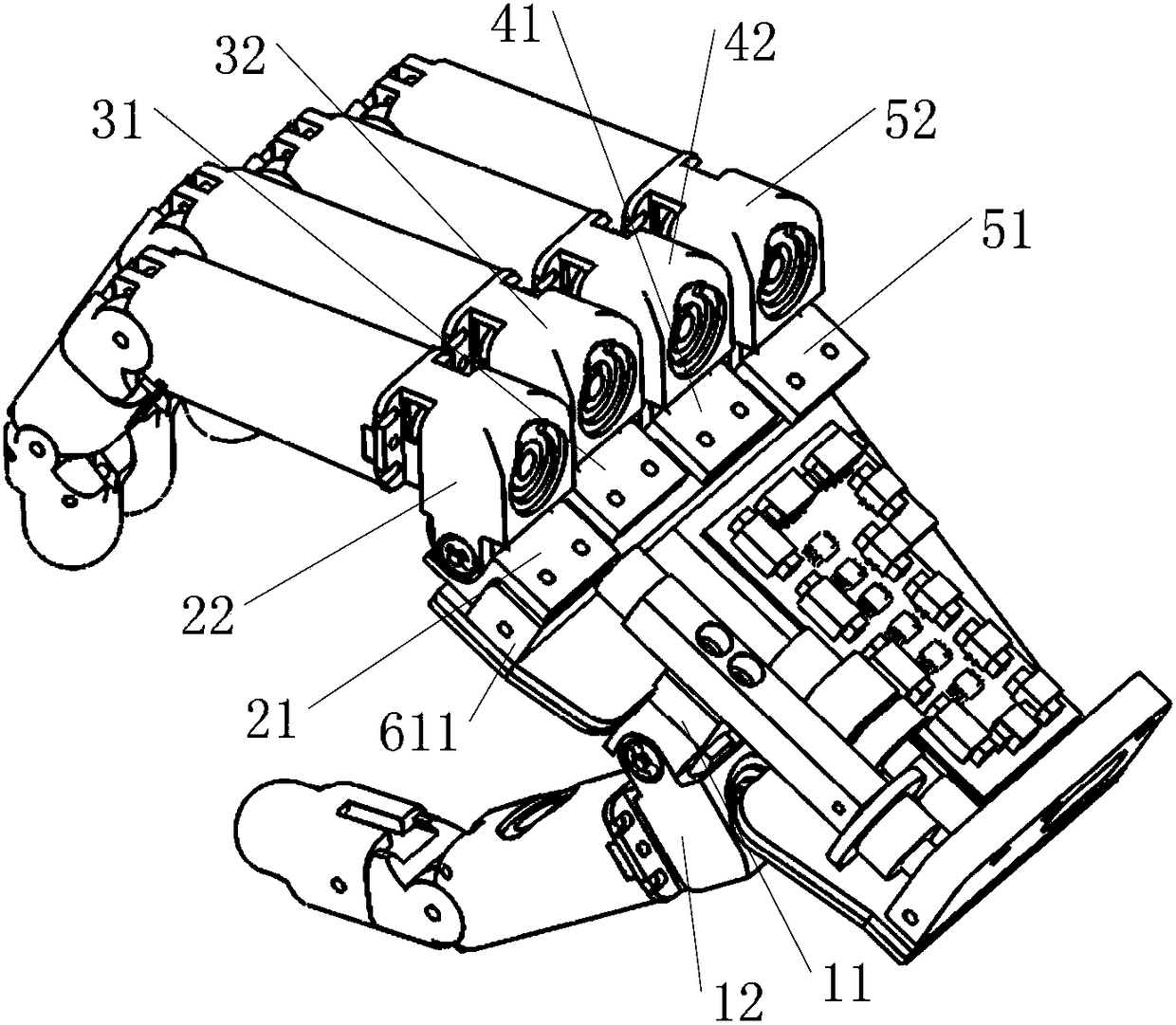
[0040] Such as Figure 1-2As shown, an under-actuated lightweight humanoid five-fingered dexterous hand provided by the present invention includes: palm 6, five fingers, five finger flexion and extension drive mechanisms, five rope transmission mechanisms and thumb rotation drive mechanisms, wherein the five fingers are respectively fixed by a Seat is installed on the palm 6, and five fingers are respectively thumb 1, index finger 2, middle finger 3, ring finger 4 and little finger 5.
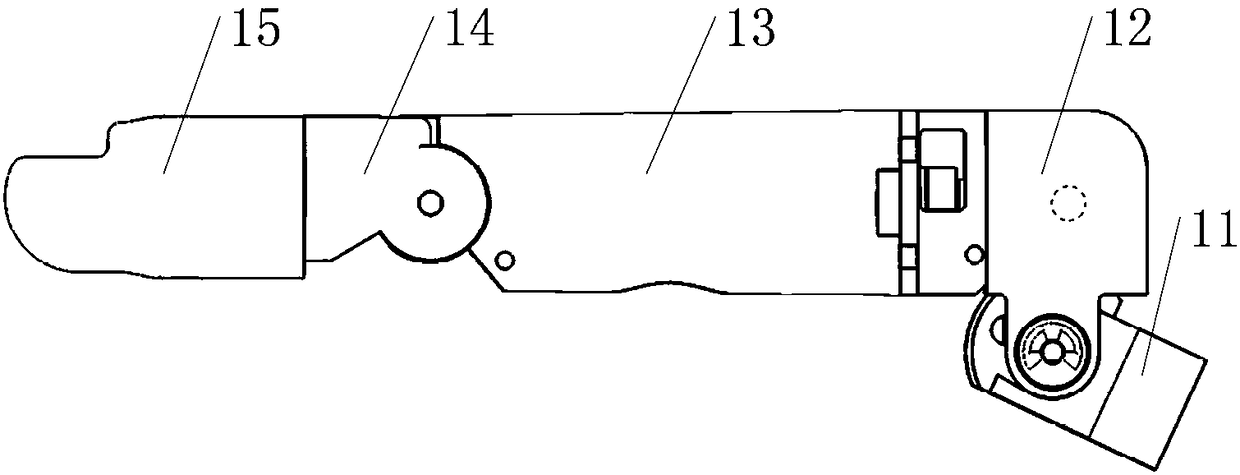
[0041] Such as Figure 3-4 As shown, the thumb 1 includes a thumb proximal knuckle base 12, a thumb proximal knuckle 13, a thumb distal knuckle 14 and a thumb distal knuckle fingertip 15, wherein the thumb proximal knuckle base 12 is fixed to the corresponding thu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More