

Hole making system for intelligent AGV lifting robot
A robotic hole-making and six-axis robot technology, which is applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problem that the working range of joint arms cannot meet the requirements of large-scale component hole making, and it is difficult for hole-making robots to come in handy. Production efficiency and other issues, to achieve the effect of improving hole making efficiency and safety, improving assembly quality, and improving utilization rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
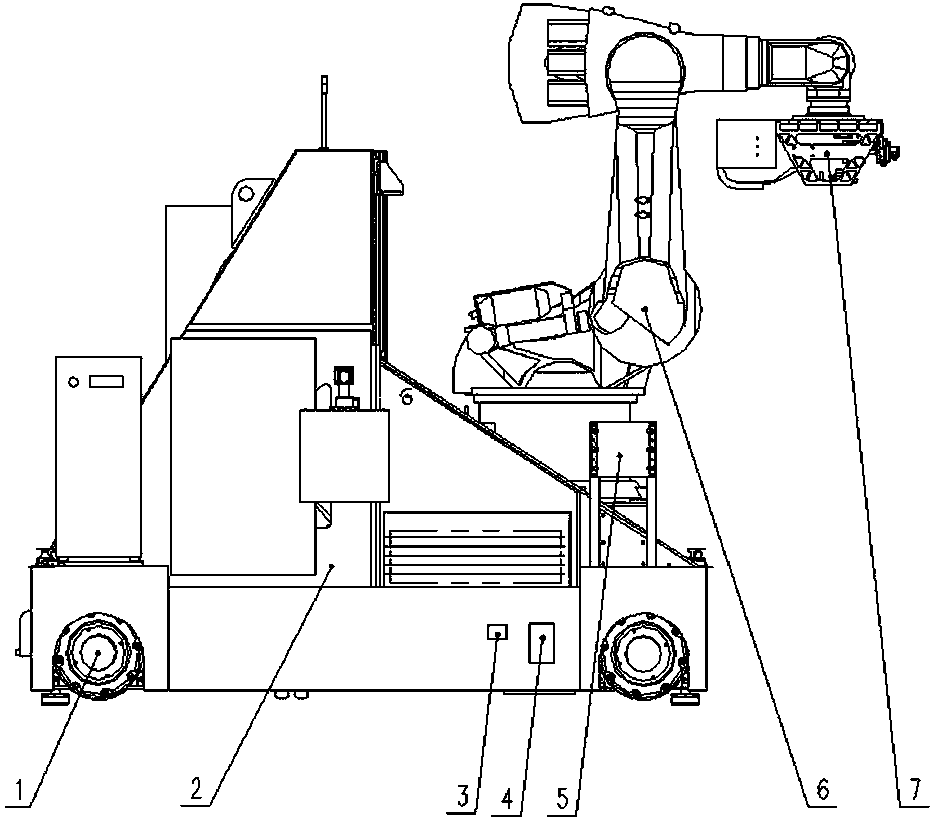
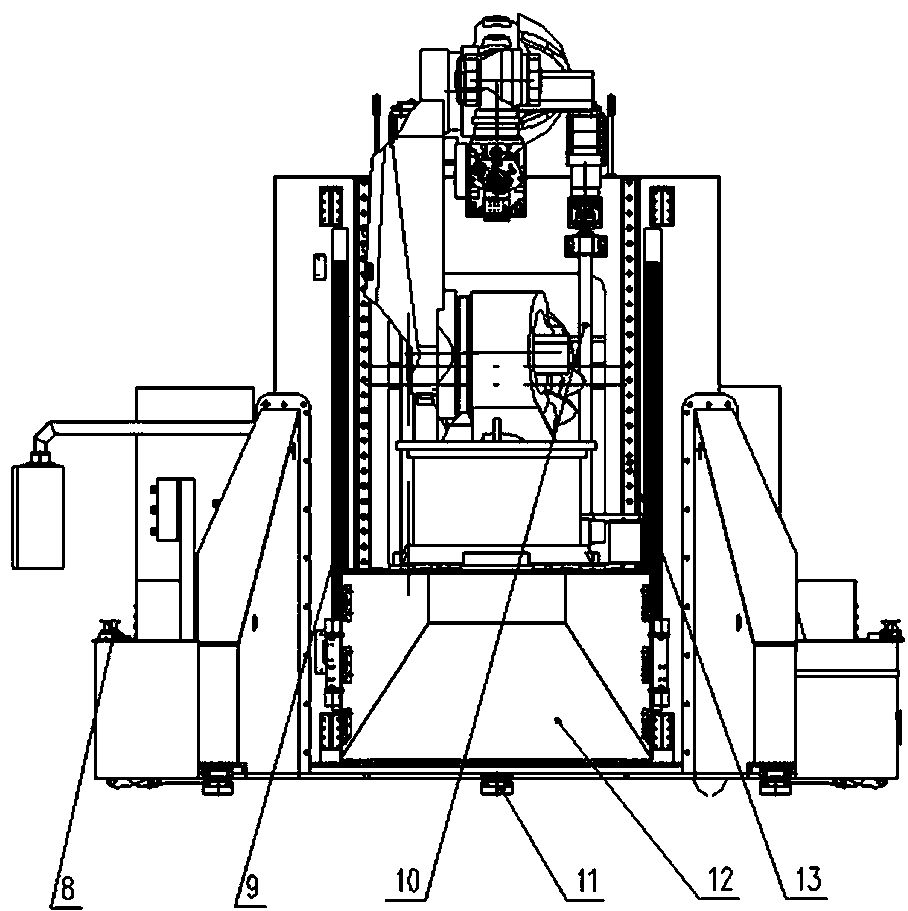
[0014] The structure of the hole-making system of the intelligent AGV lifting robot of the present invention is as follows: figure 1 and figure 2 As shown, it includes a mecanum wheel assembly 1, a car body 2, a laser transmitter 3, a positioning camera 4, a test piece table 5, a six-axis robot 6, an end effector 7, a laser scanner 8, a grating ruler 9, a lift Driving device 10, self-adaptive outrigger 11, lifting platform 12, linear guide rail 13; the car body 2 includes two parts: chassis and column; the mecanum wheel assembly 1 is installed on the car body through an air spring lifting suspension device Below the chassis of the car body 2, the adaptive leg 11 is installed on the underside of the chassis of the car body 2; the laser transmitter 3 and the positioning camera 4 are fixedly installed on both sides of the chassis of the car body 2, and the test piece table On the chassis of the car body 2, the laser scanner 8 is installed at the front and rear diagonal position...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More