

Three-freedom-degree parallel mechanism control method
A control method and technology of degrees of freedom, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of insufficient research on three-degree-of-freedom motion platforms, difficult implementation of control algorithms, complex control methods, etc., to achieve good promotion value, The hardware structure is simple and the effect is easy to achieve
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be further described below in conjunction with the accompanying drawings. The following examples are only used to illustrate the technical solution of the present invention more clearly, but not to limit the protection scope of the present invention.
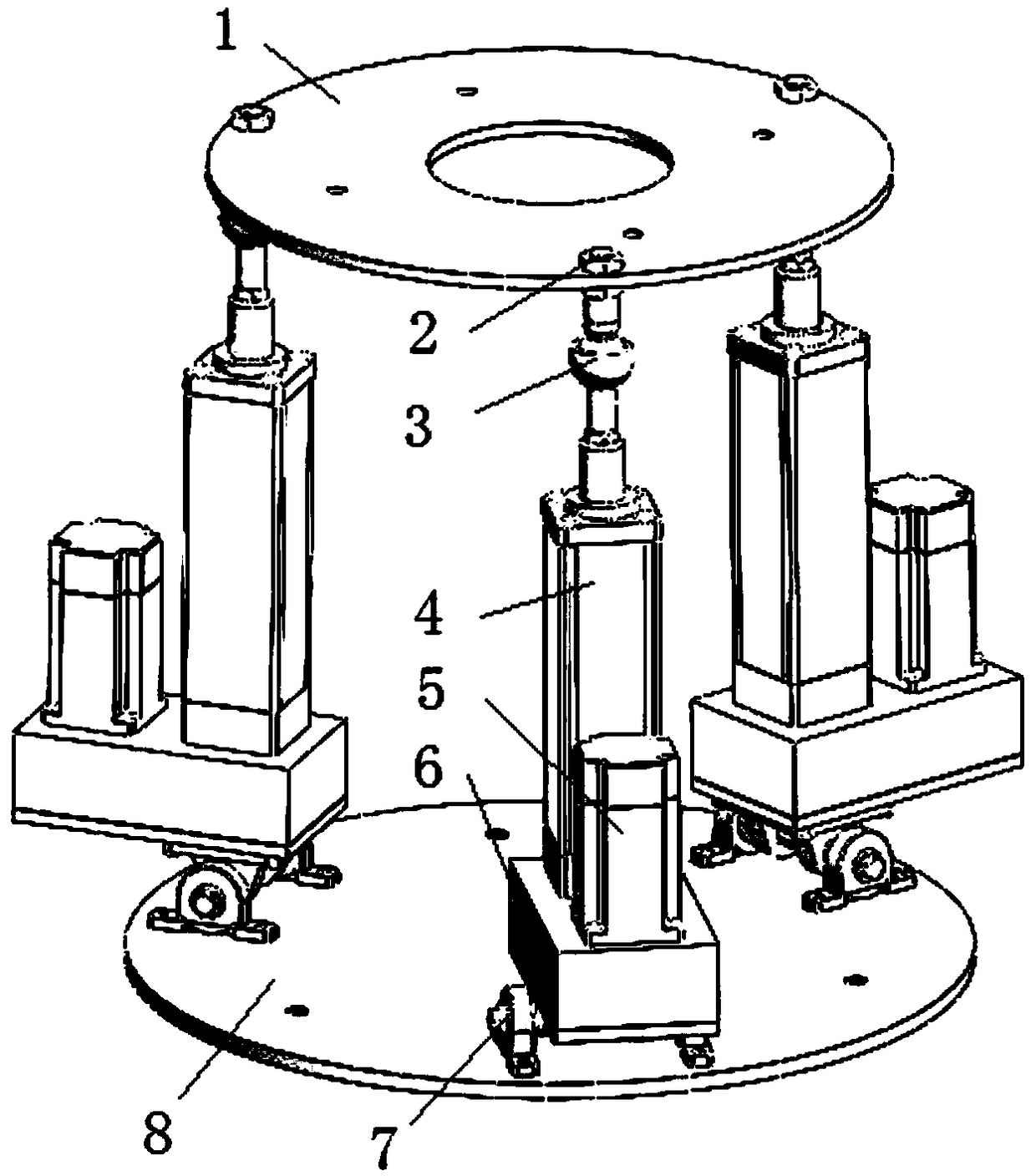
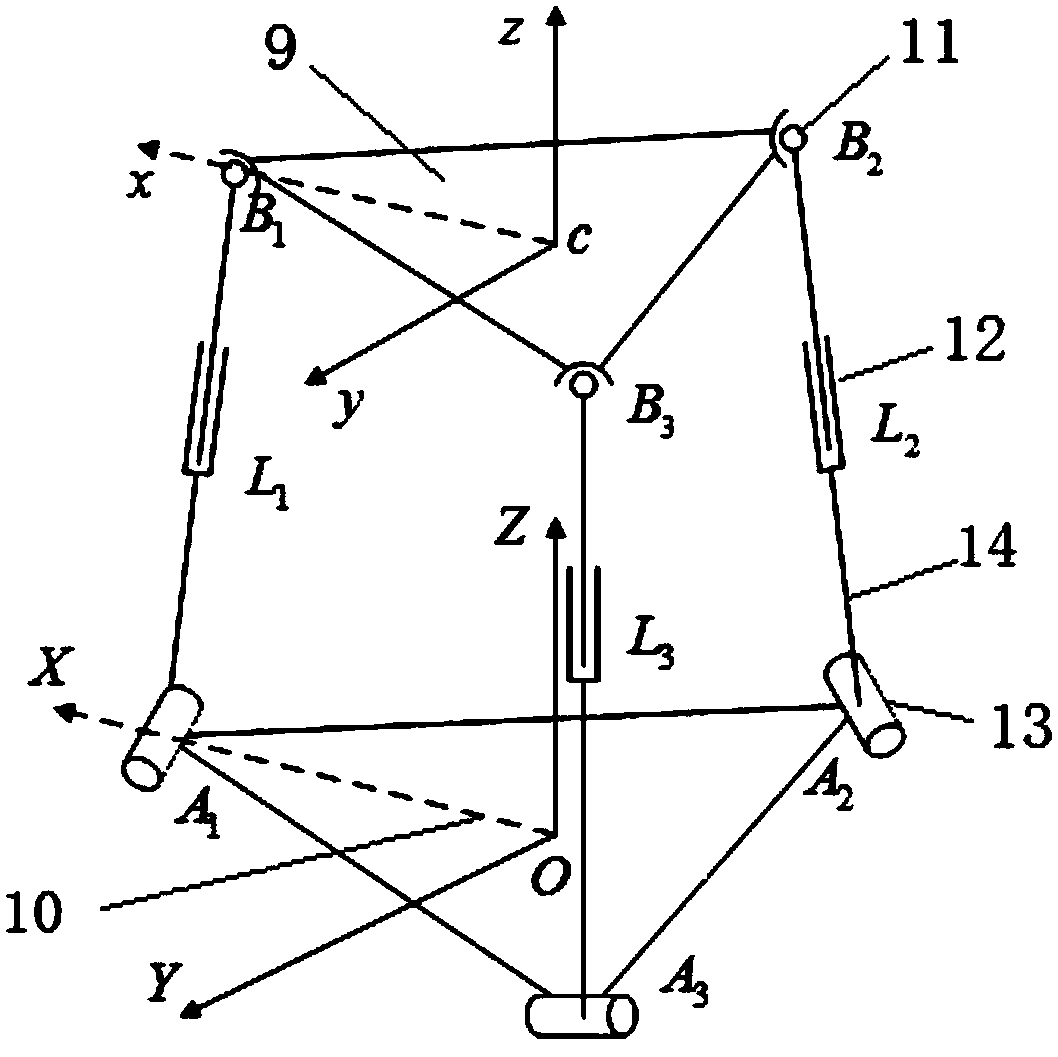
[0040] Such as figure 1 and 2 As shown, the platform mechanism comprises a static platform (8) and a dynamic platform (1) located above the static platform (8), the static platform (8) and the dynamic platform (1) are circular, and the dynamic platform (1) It is connected with the static platform (8) by three branch chains, each branch chain (12) is mainly composed of a ball pair (11), a moving pair (12) and a rotating pair (13), and the ball pair (11) is connected to the moving pair (12) and moving platform (1), rotating pair (13) connects moving pair (12) and static platform (8), and described ball pair is used for realizing moving platform to swing in any direction, and described moving pai...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More