

An underwater hanging robot
An underwater robot and robot technology, applied in the field of robots, can solve the problems of insufficient thrust, limit the carrying capacity of underwater robots, and not suitable for the deployment and recovery of underwater instruments and equipment, and achieve the effect of high stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0020] In order to further understand the content of the invention, features and effects of the present invention, the following embodiments are exemplified and described in detail with the accompanying drawings as follows:
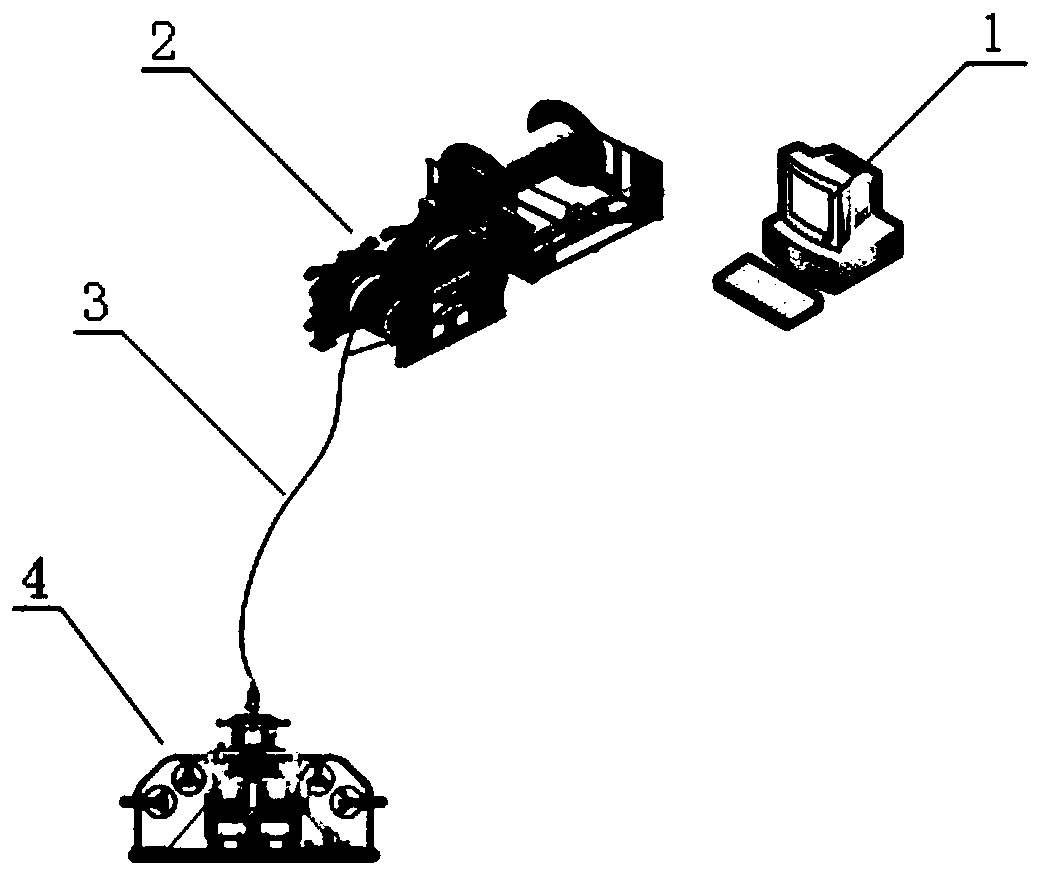
[0021] as attached Figure 1 to Figure 3 As shown, an underwater lifting robot includes a deck control system 1, a winch 2, an umbilical cable 3, and an underwater robot 4. The deck control system 1 and the winch 2 are arranged on a mother ship.
[0022] One end of the umbilical cable 3 is connected with the deck control system 1, and the other end is hinged with the upper end of the underwater robot 4 to realize power supply and data connection. The deck control system 1 realizes power supply and data connection with the underwater vehicle 4 through the umbilical cable 3 . The state information of the underwater robot 4 is uploaded to the deck control system 1 through the umbilical cable 3 , and the deck control system 1 sends the control signal down to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More