

Door and window point cloud shape detecting method and system based on laser point cloud data
A technology of laser point cloud data and point cloud data, which is applied in image data processing, instruments, calculations, etc., can solve the problems of no door and window shape detection algorithm process, waste of manpower, material resources and time, low efficiency and precision, etc., to improve the survey Efficiency, reduced loss of manpower and material resources, and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The technical scheme of the invention can adopt computer software to support the automatic operation process. The technical solution of the present invention will be described in detail below in conjunction with the drawings and embodiments.
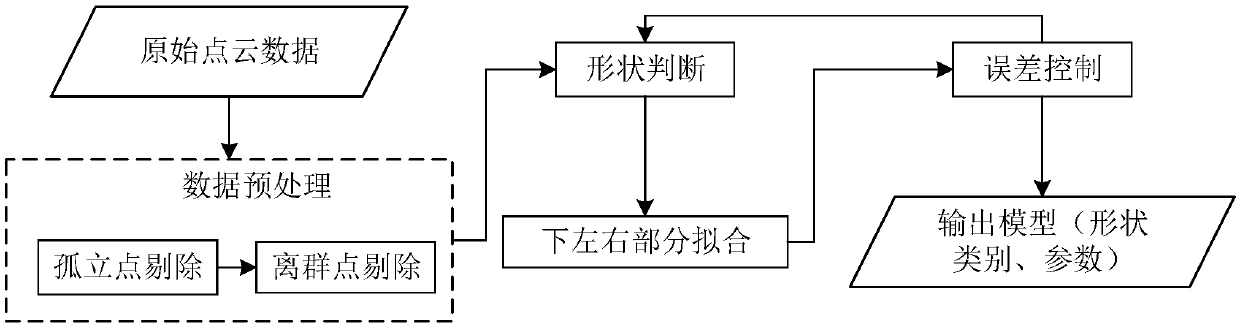
[0048] figure 1Shown is the flow chart of the shape detection and extraction technology based on laser point cloud data. The method of the present invention will be further described in detail for each step in the flow of the embodiment below.
[0049] (1) Data preparation, preprocessing the original point cloud data to obtain point cloud data with gross errors removed.
[0050] In the embodiment, remove isolated point, outlier point and burr point: for a point Pg in the point cloud, if the distance between it and the closest point is much greater than the average point spacing of the point cloud, then the Pg point is called an isolated point; For a point Pl in the cloud, if you search for its neighboring points according to a p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More