

Quaternion description based rapid convergence control method of quardrotor
A technology of quadrotor UAV and control method, which is applied in the field of flight control and can solve problems such as infinite adjustment time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0114] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
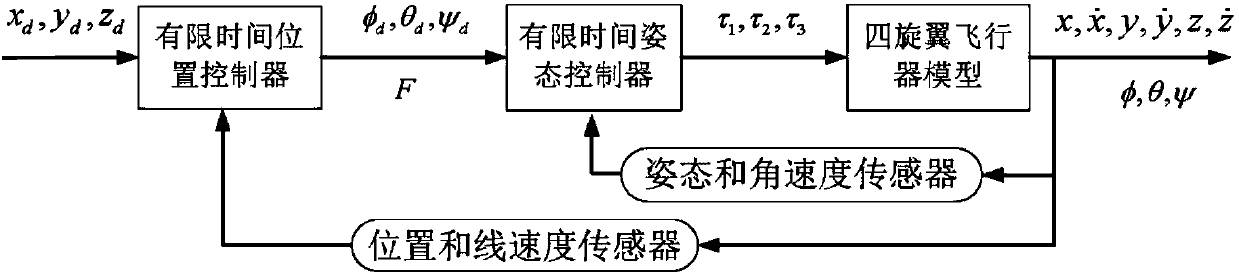
[0115] Simulation and experiment of the present invention all realize by the Simulink toolbox in the simulation software MATLAB R2010 to build the model of quadrotor unmanned aerial vehicle, figure 1 It is a schematic diagram of the double-loop control strategy adopted by the present invention.
[0116] The specific steps of the fast convergence control method for quadrotor UAV based on quaternion description are as follows:
[0117] S1. Establish a quadrotor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More