

Adaptive control method for multiple humanoid robots in case of immeasurable speed
A humanoid robot, self-adaptive control technology, applied in the direction of self-adaptive control, general control system, control/regulation system, etc., can solve the problems of negative impact of system performance, dependence, noise interference, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0074] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0075] The self-adaptive control method of multi-robots in this embodiment under unpredictable speed and limited state includes the following steps:
[0076] An adaptive control method for a plurality of humanoid robots under unmeasurable speed, characterized in that: comprising the following steps:
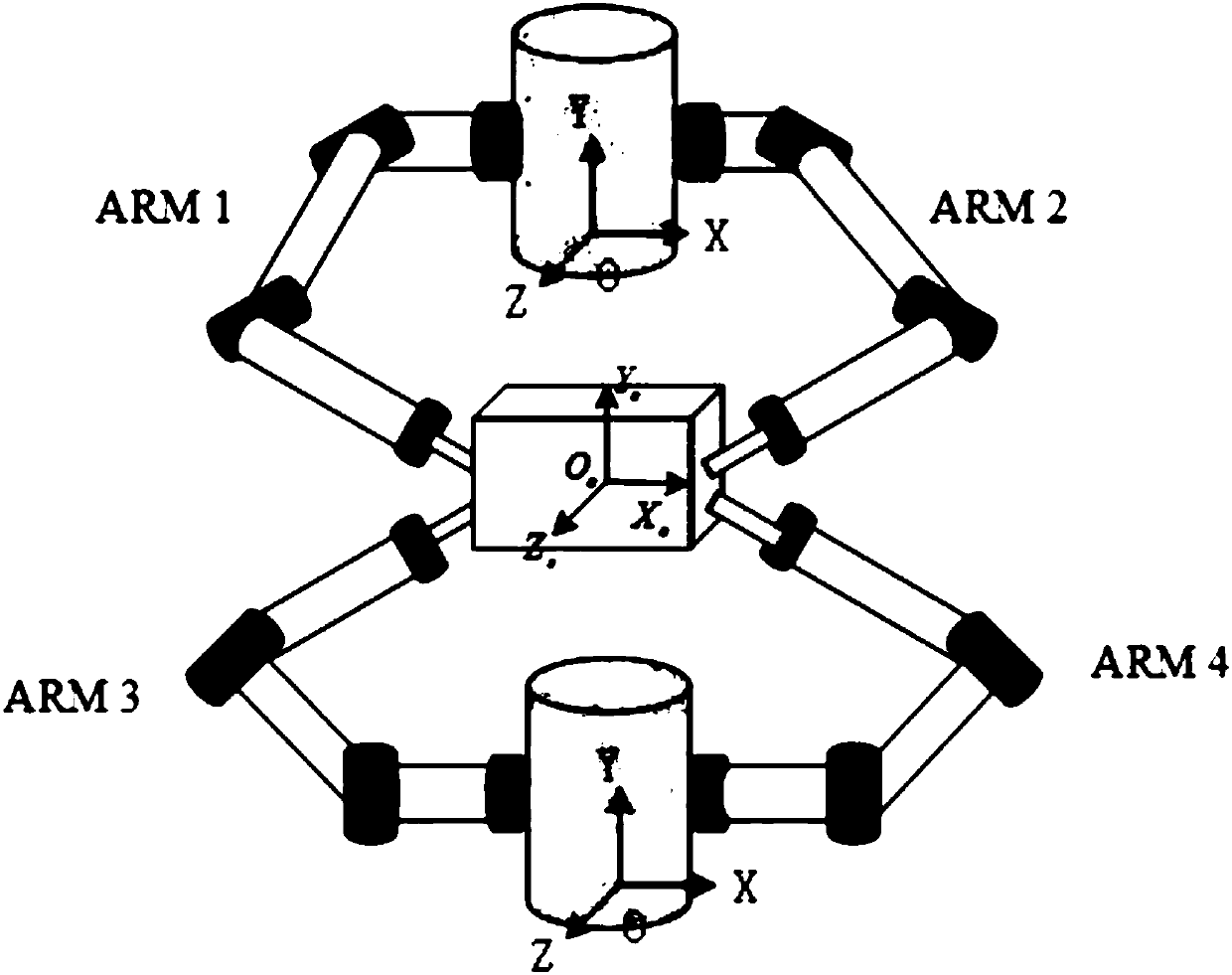
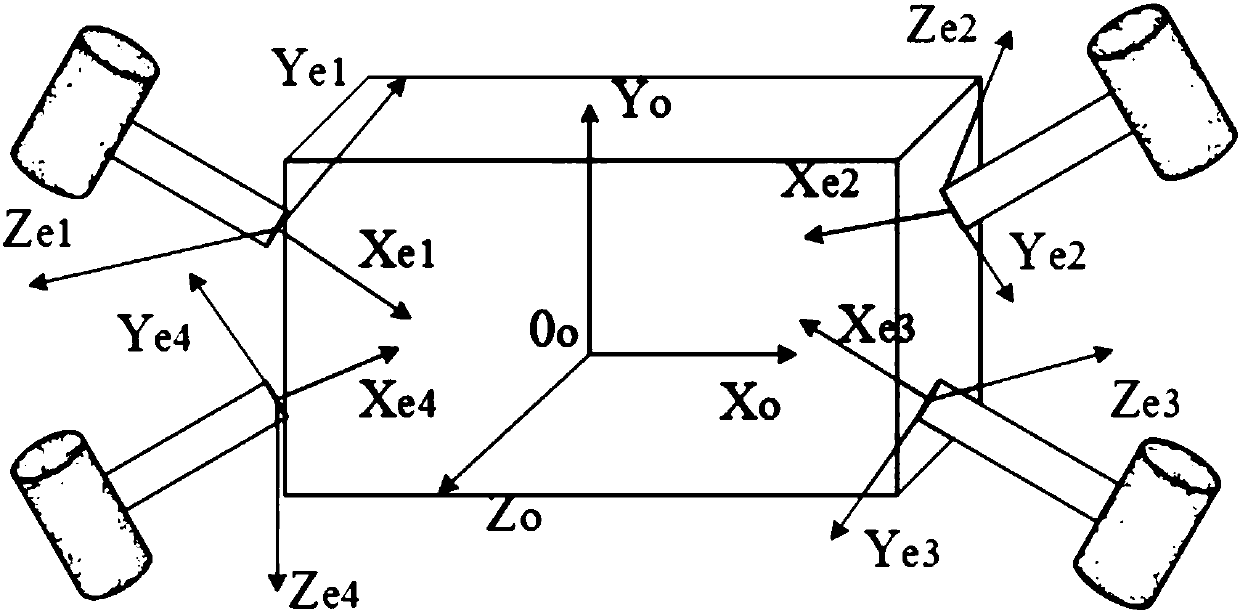
[0077] Step 1. Establish a mathematical model for multiple humanoid robots to cooperatively grasp objects:
[0078]
[0079] In the formula, Is a joint variable vector, which represents the motion of the manipulator, and N represents the degree of freedom of the manipulator; M(q)∈R mN×mN represents the positive definite symmetric inertia matrix of the manipulator, Represents the Coriolis and centrifugal matrices of the manipulator, G(q)∈R mN Indicates the gravity vector of the manipulator; J e (q)∈R mN×mN Represents the Jacobian matrix of the ma...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More