

AGV trolley indoor positioning and navigation system and control method thereof
A technology of positioning navigation and small car room, applied in the field of indoor navigation, can solve the problems of complex processing algorithm, difficult to eliminate cumulative error, large amount of calculation, etc., and achieve the effect of simple and reliable system, real-time accurate positioning, and strong anti-interference ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below through the accompanying drawings and embodiments.
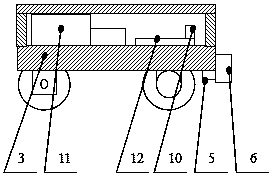
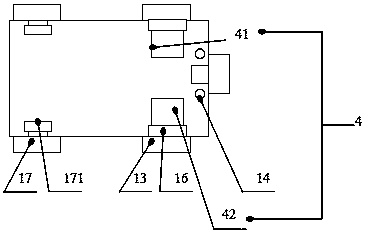
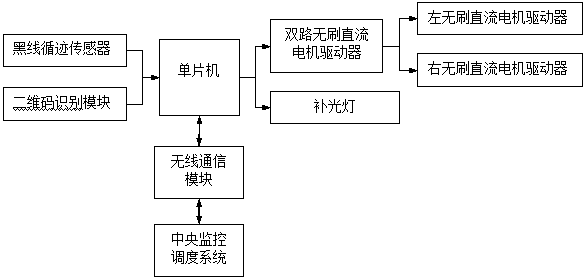
[0027] In this embodiment 1, if figure 1 , figure 2 , image 3 , Figure 4 As shown, an indoor positioning and navigation system of an AGV trolley includes: a black line grid module, which is an n×n black line grid, two nodes of each grid are provided with two-dimensional codes, and each two-dimensional code is set There is position information; at least one AGV trolley 1, including a driver for movement, a black line tracking sensor 5 for identifying the black line grid, and a two-dimensional code recognition module for reading the two-dimensional code information of the current node 2 6. The control module, which sets the moving path from the initial position to the target position; the central monitoring and dispatching system establishes a node QR c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More