

Self-adaptive RBFNNs noise-measurement active-disturbance-rejection control method for rotor wing flight manipulator
A technology of active disturbance rejection control and manipulator, applied in the fields of automatic control and multi-rotor aircraft control, can solve the uncertainty of the internal parameters of the manipulator of the rotorcraft, the flight platform, the coupling between the manipulator and the rotorcraft, and the interference, increase Problems such as the difficulty of grasping the target with the robotic arm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0104] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments, wherein the specific embodiments and descriptions are only used to explain the present invention, but are not intended to limit the present invention.
[0105] A kind of rotor flight manipulator adaptive RBFNNs measuring noise active disturbance rejection control method, comprises the following steps:
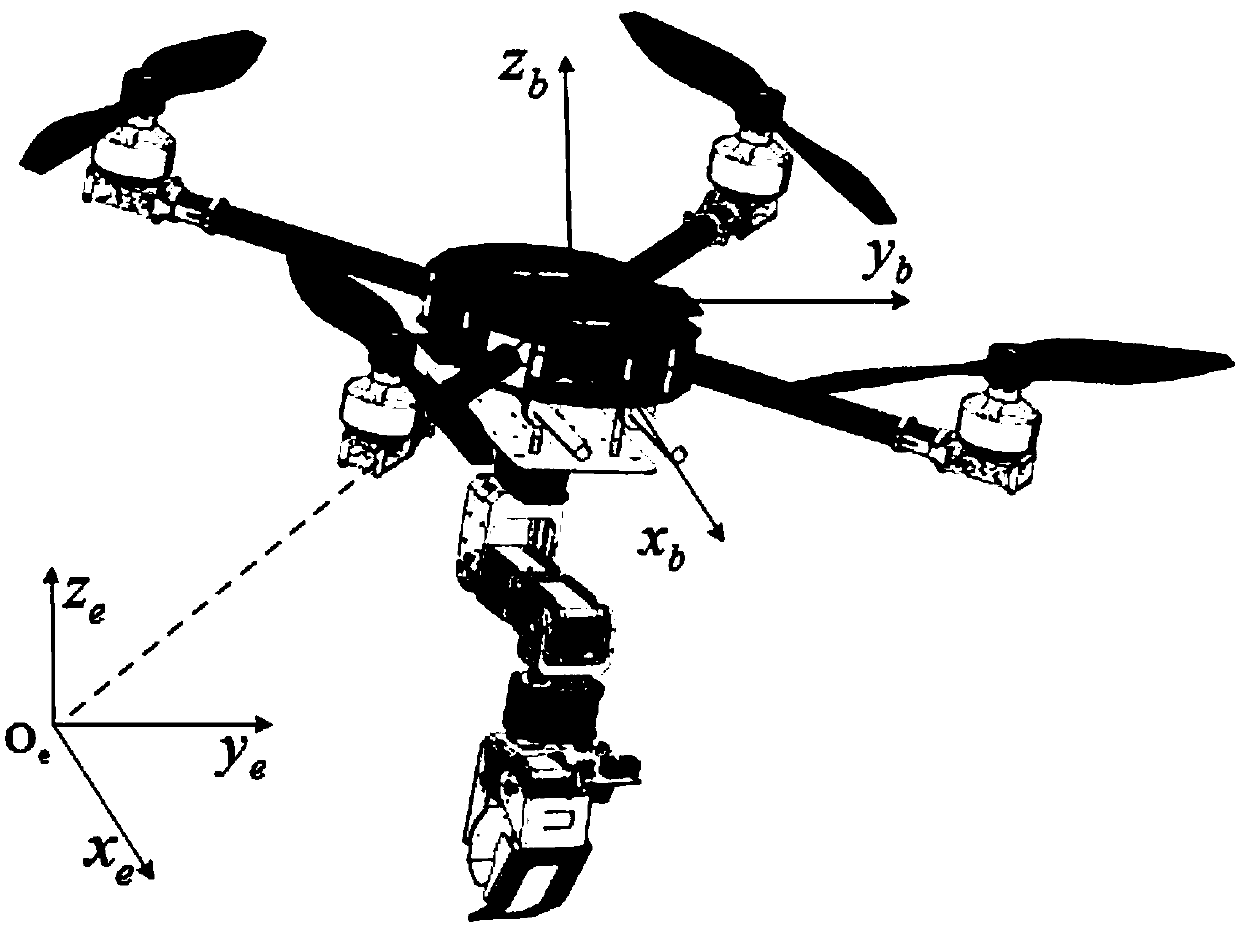
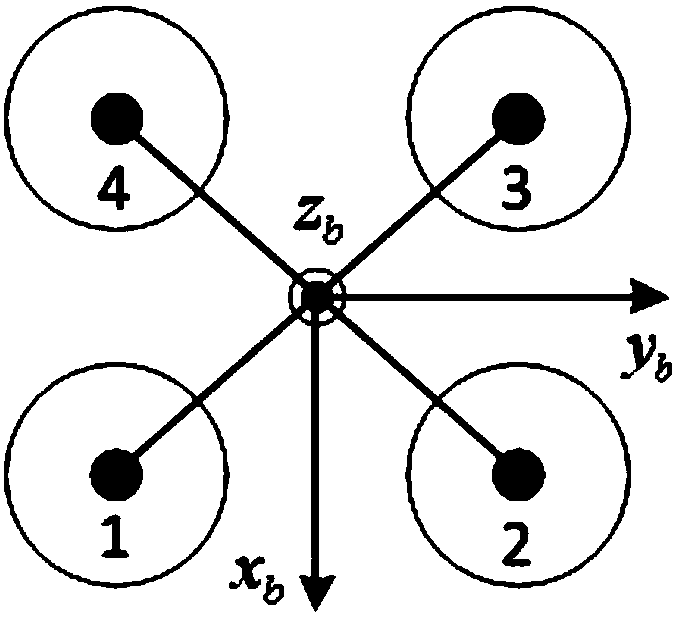
[0106] Step 1: Carry out force analysis on the rotor flying manipulator, use the Newton-Euler method to establish the dynamic model of the rotor flying manipulator, and make a linear assumption to simplify the model;
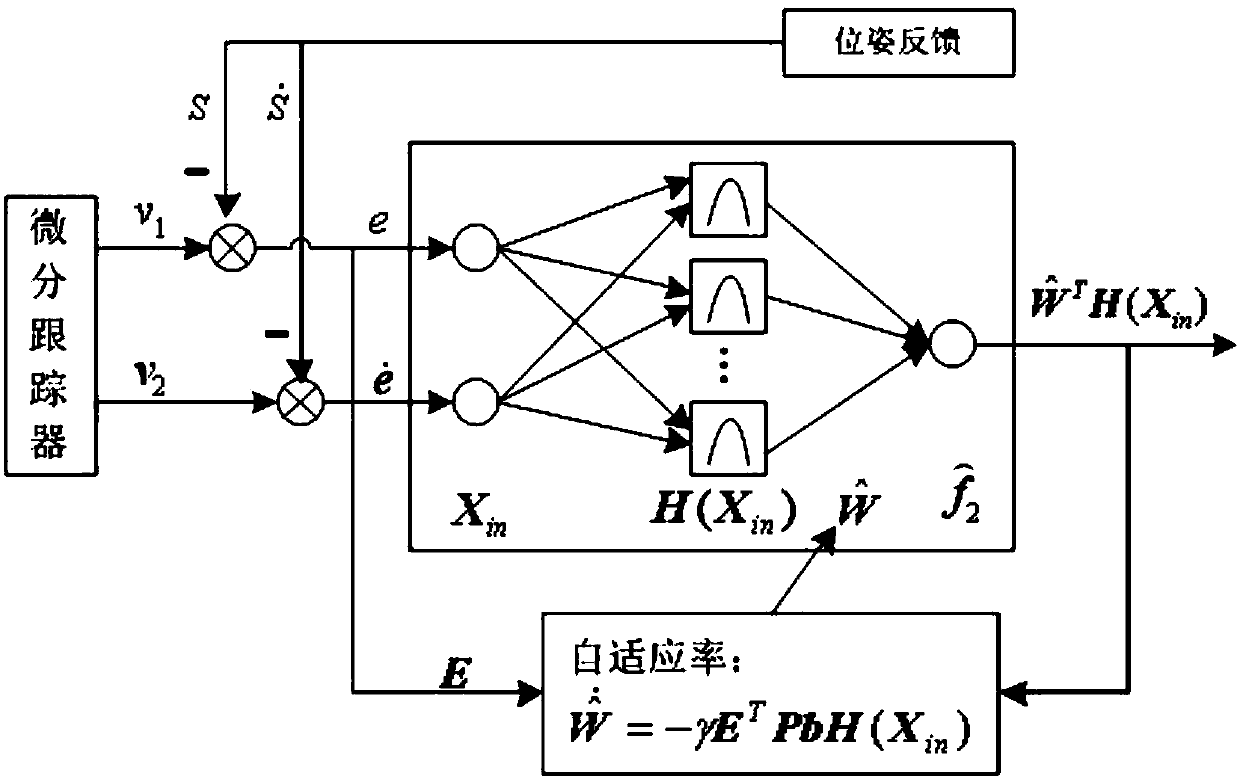
[0107] Step 2, according to the dynamic model of the Z channel in step 1, design a height controller based on RBFNNs\ADRC;
[0108] Step 3, on the basis of height control in step 2, design a horizontal controller based on RBFNNs\ADRC according to the dynamic model of the horizontal channel in step 1;
[0109] Step 4, according to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More