

A three-bus architecture for underwater vehicle data, power and alarm signals
An underwater vehicle and data bus technology, applied in the direction of electrical digital data processing, instruments, etc., can solve problems such as low reliability, difficulty in development and testing work, and paralysis, and achieve high system work efficiency, easy development and testing, and anti-interference powerful effect
Active Publication Date: 2014-08-20
NORTHWESTERN POLYTECHNICAL UNIV
View PDF0 Cites 1 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
(1) The autopilot undertakes all the work of data collection, task planning, control calculation, and drive output, making it difficult to develop and test;
(2) The reliability of the system is low. Once the autopilot fails, the entire control system will be paralyzed, and even cannot be shut down to ensure that the underwater vehicle can float safely;
(3) The scalability of the system is poor. The data acquisition channels, interrupt resources, and register addresses of the autopilot are all determined and limited. When adding equipment, it must be redesigned
However, the fault handling of this design depends entirely on whether the autopilot is working normally, and once the autopilot fails (often the cause of ultra-deep), the emergency detection and processing actions cannot be completed, while other components Even if it works normally, the emergency shutdown alarm signal cannot be detected and processed, so the safety of the underwater vehicle cannot be guaranteed
To sum up, with the development of sensor technology, communication technology, and automatic control technology, higher challenges have been proposed to the carrying capacity, intelligence level, reliability, and maintainability of underwater vehicles. Traditional centralized control method has been unable to meet the requirements of the underwater vehicle control system
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
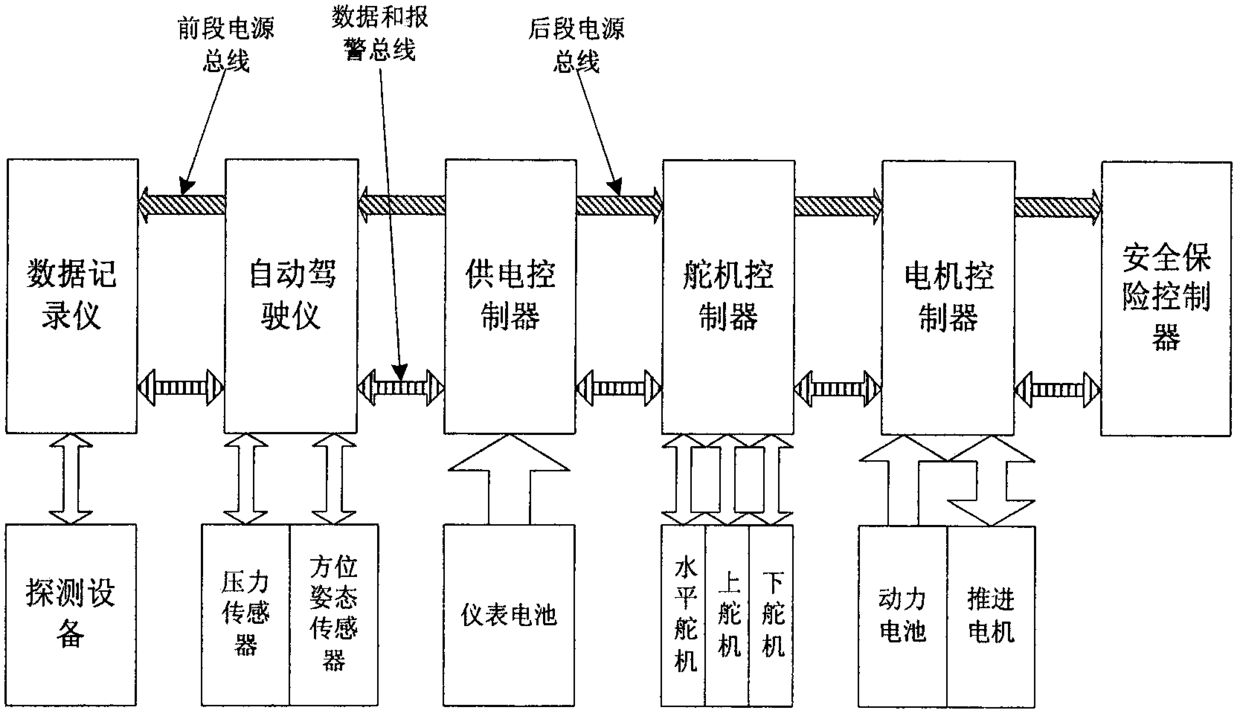
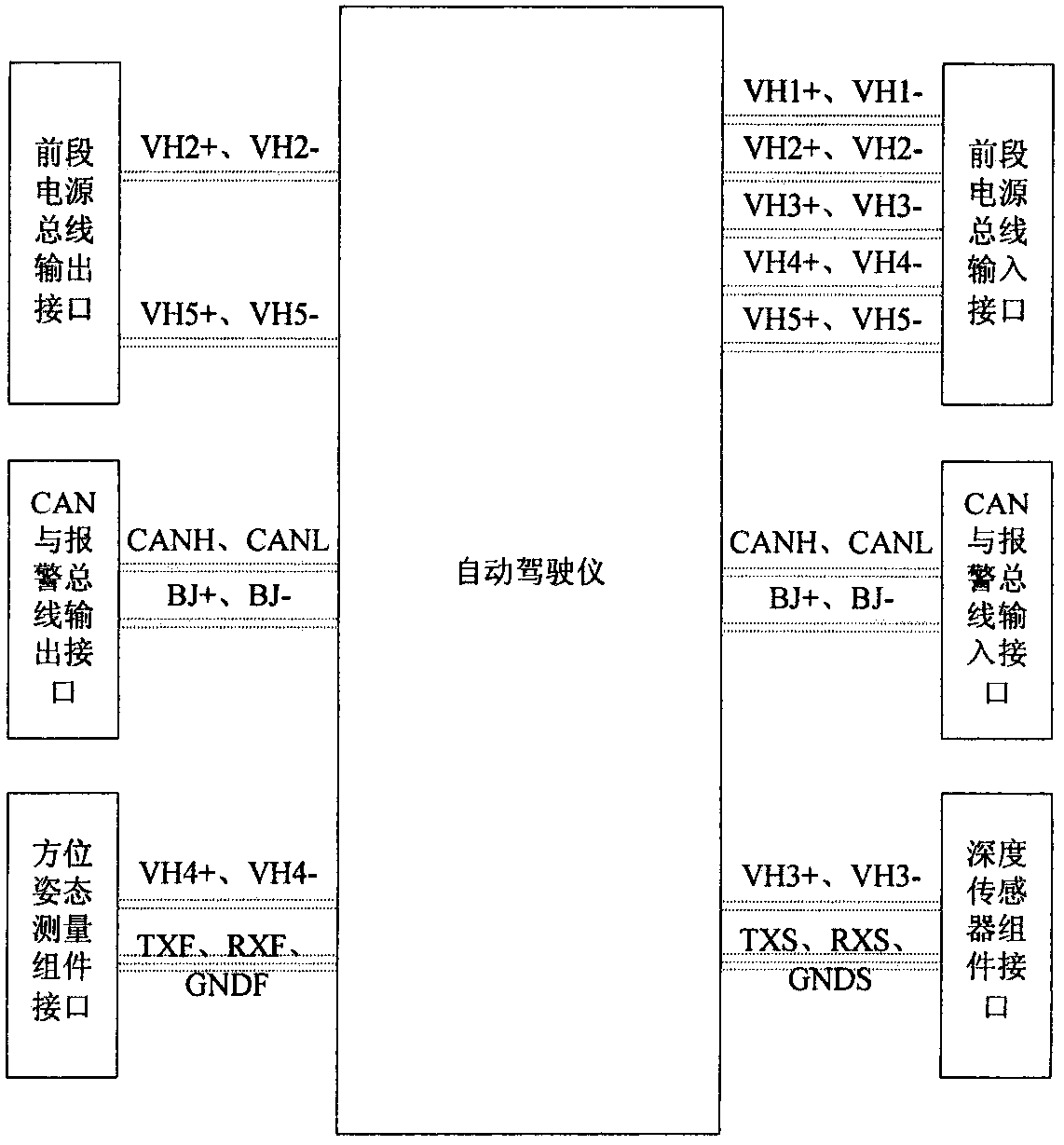
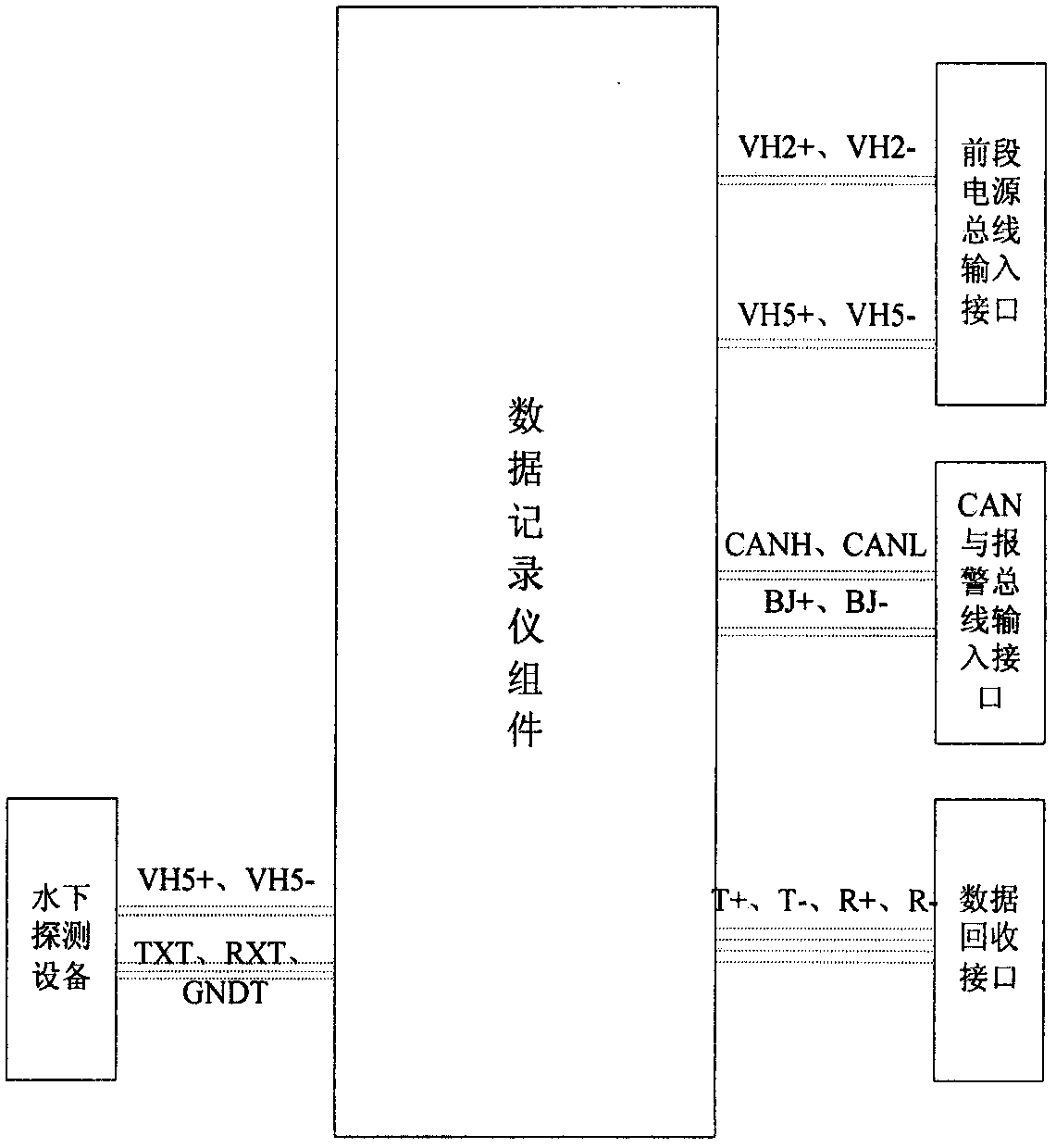
The invention relates to a three-bus structure for underwater vehicle data, power supply and alarm signal, which is characterized in that: each device that needs to be connected is provided with its own input connection port and output connection port, and the data bus, power supply bus and the alarm bus pass through each input connection port and output connection port in series; the data bus adopts the CAN industrial bus; The required power is drawn from the input connection port, and the remaining power is drawn from the output connection port to connect with the input connection port of other equipment; the alarm bus is drawn from the fault detection equipment in the underwater vehicle control system and passes through all The input connection port and output connection port of the device. This connection mode of the three-bus distributed control system has the advantages of high reliability, convenient connection and good expansibility.
Description
technical field The invention relates to underwater vehicle control technology, in particular to a three-bus structure for data, power and alarm signals of the underwater vehicle, belonging to distributed control equipment for the underwater vehicle. Background technique Conventional underwater vehicle control systems, especially autonomous underwater vehicle control systems, mostly adopt a centralized control method, that is, the main control computer, namely the autopilot, realizes data acquisition and drive control of all sensitive components and actuators. The autopilot collects analog signals such as voltage and current through the analog / digital conversion circuit, and collects the data of the serial device through the serial port circuit. After the autopilot processes these data, it outputs the control value through the digital / analog conversion circuit to drive the steering gear, etc. The mechanism controls the equipment by outputting switching signals through the di...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityPatents(China)
IPC IPC(8): G06F13/40
Inventor严卫生高剑张福斌梁庆卫张立川崔荣鑫张克涵刘明雍王银涛彭星光许晖
OwnerNORTHWESTERN POLYTECHNICAL UNIV