

Spherical fruit and vegetable picking robot
A technology for picking robots and robot bodies, which can be applied to picking machines, instruments, harvesters, etc., and can solve problems such as cost burden, heavy labor, and impact on fruit quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The embodiments involved in the present invention will be described in further detail below in conjunction with the accompanying drawings.
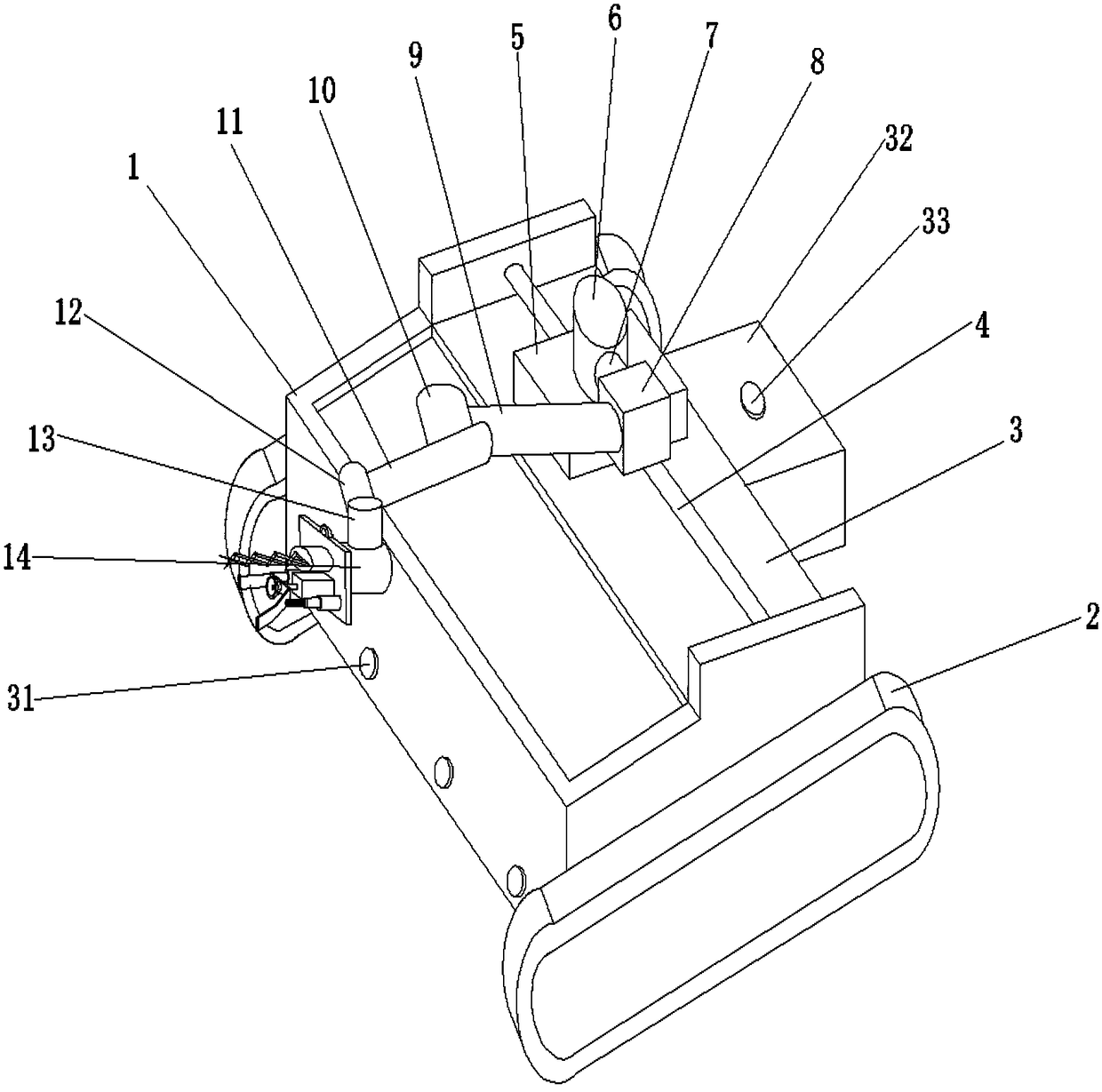
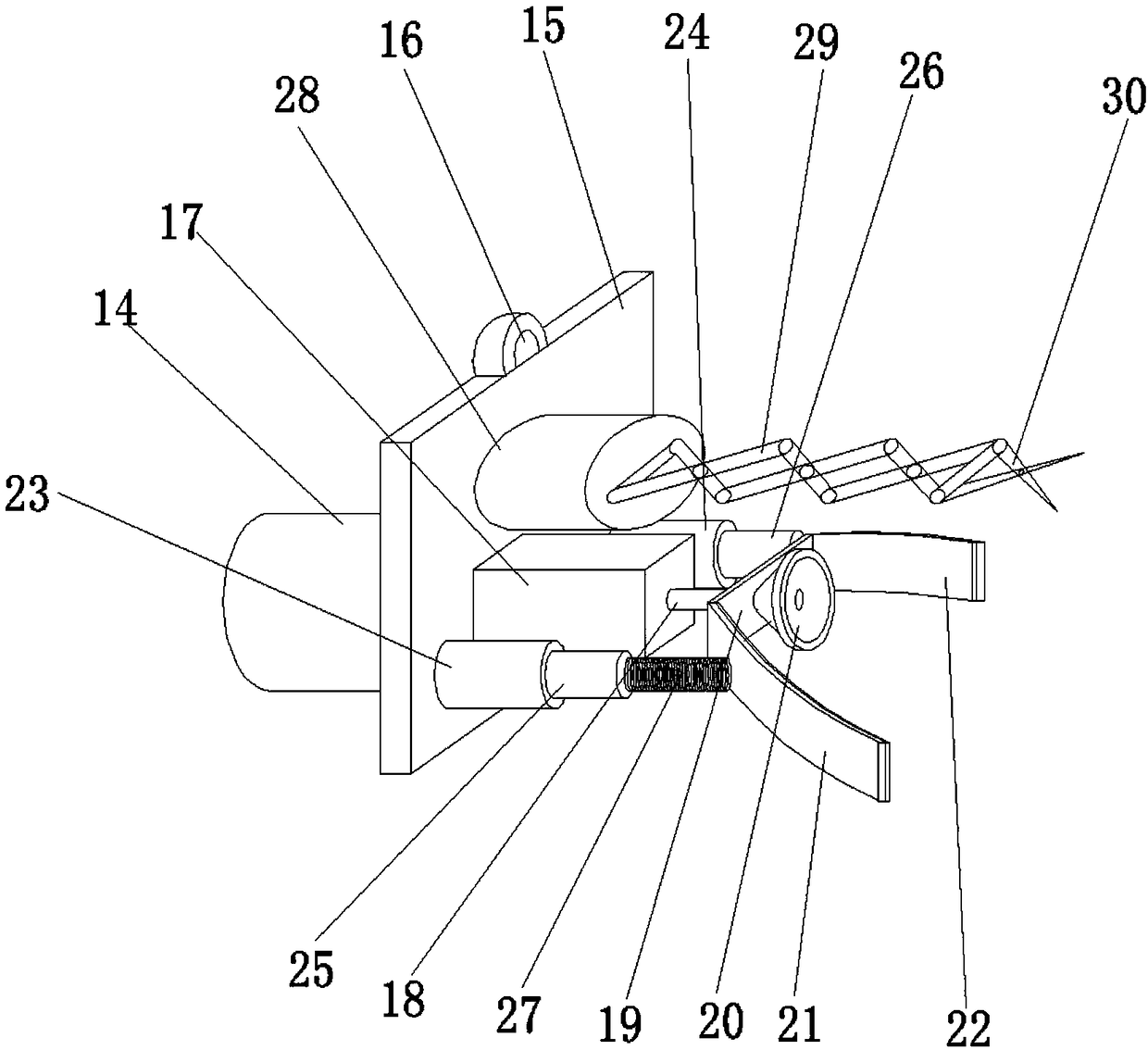
[0020] combine Figure 1 ~ Figure 3, a spherical fruit and vegetable picking robot, comprising a robot body 1, the robot body 1 is provided with a kinematic mechanism 2, the kinematic mechanism 2 is a crawler-type movement wheel, and the crawler-type movement wheel is located on both sides of the robot body 1, and the robot body 1 is an upper-end open structure , the top of the robot body 1 is provided with a top plate 3, the top plate 3 is a U-shaped structure, the length of the top plate 3 is not less than the length of the robot body 1, the width of the top plate 3 is not more than 1 / 2 of the width of the robot body 1, and the transverse portion of the top plate 3 Connect with the top of robot body 1, top plate 3 is positioned at the top side of robot body 1, is provided with screw mandrel 4 between the vertical part of top plat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More