

Plane constraint error model and robot self-calibration method
An error model and plane constraint technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as increasing the difficulty of calibration experiments, harsh conditions, and affecting calibration accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
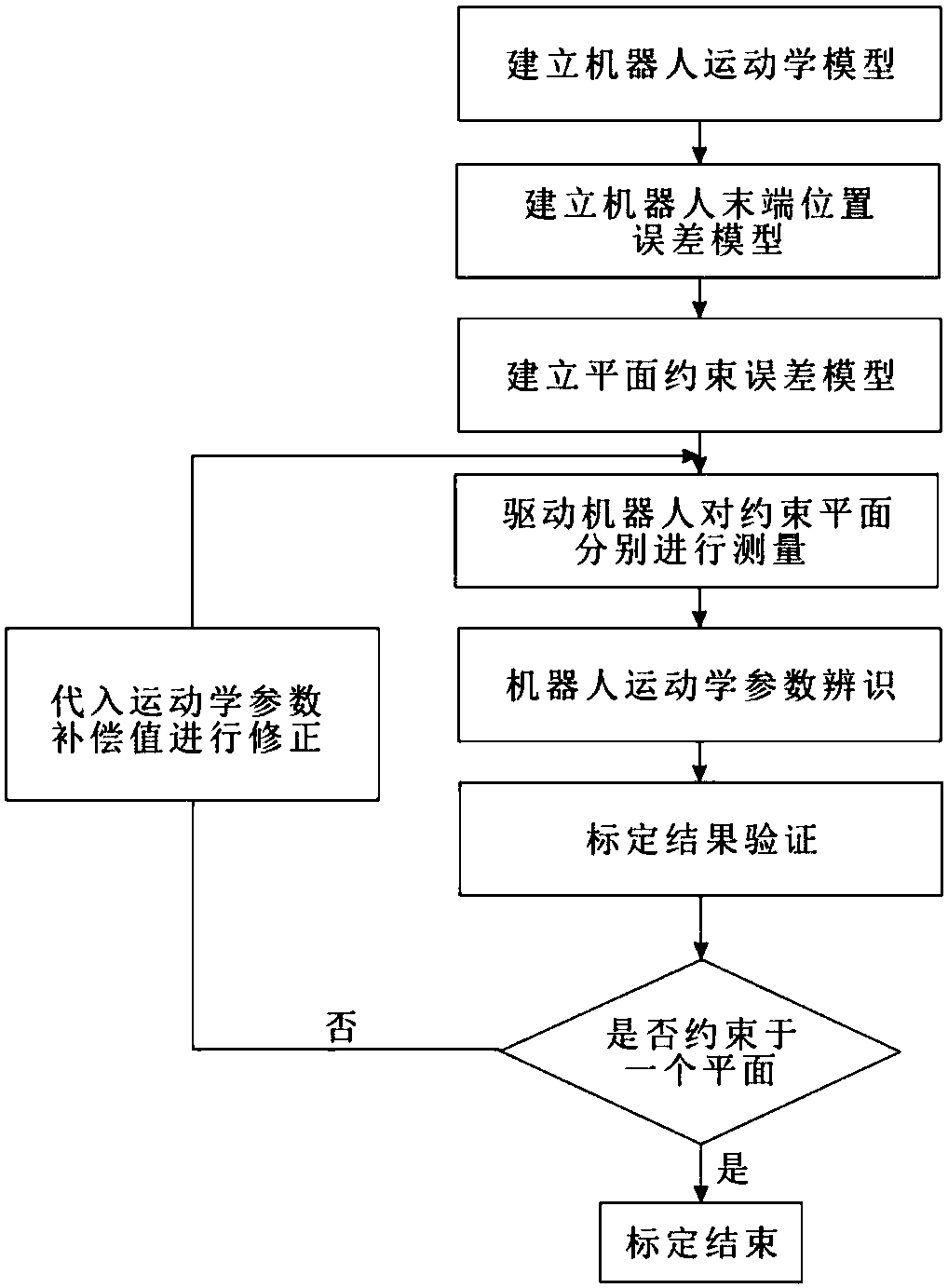
[0063] like figure 1 Shown is a schematic flow chart of the planar constraint error model and the robot self-calibration method described in the first embodiment of the present invention. The so-called calibration is to use advanced measurement means and appropriate parameter identification methods to identify the accurate parameters of the robot model, thereby improving the accuracy of the robot. precision process. In order to solve the problems of high cost of measuring instruments, complicated installation and operation, professional and technical personnel are required to operate these instruments, and the space position of the calibration block is demanding.
[0064] This embodiment provides a plane-constrained error model and a robot self-calibration method, which uses the establishment of a plane-constrained error model to self-calibrate the robot. The measurement of kinematic parameters is usually identified by the internal sensor data and the external measurement devi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More