

Robot-based electronic element hand-eye coordination plug-in mechanism
An electronic component, hand-eye coordination technology, applied in electrical components, electrical components, manipulators, etc., can solve the problems of low plug-in efficiency, difficult positioning, and inability to adjust the angle of industrial cameras, so as to improve adaptability, improve plug-in accuracy, save money The effect of human resources and time cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
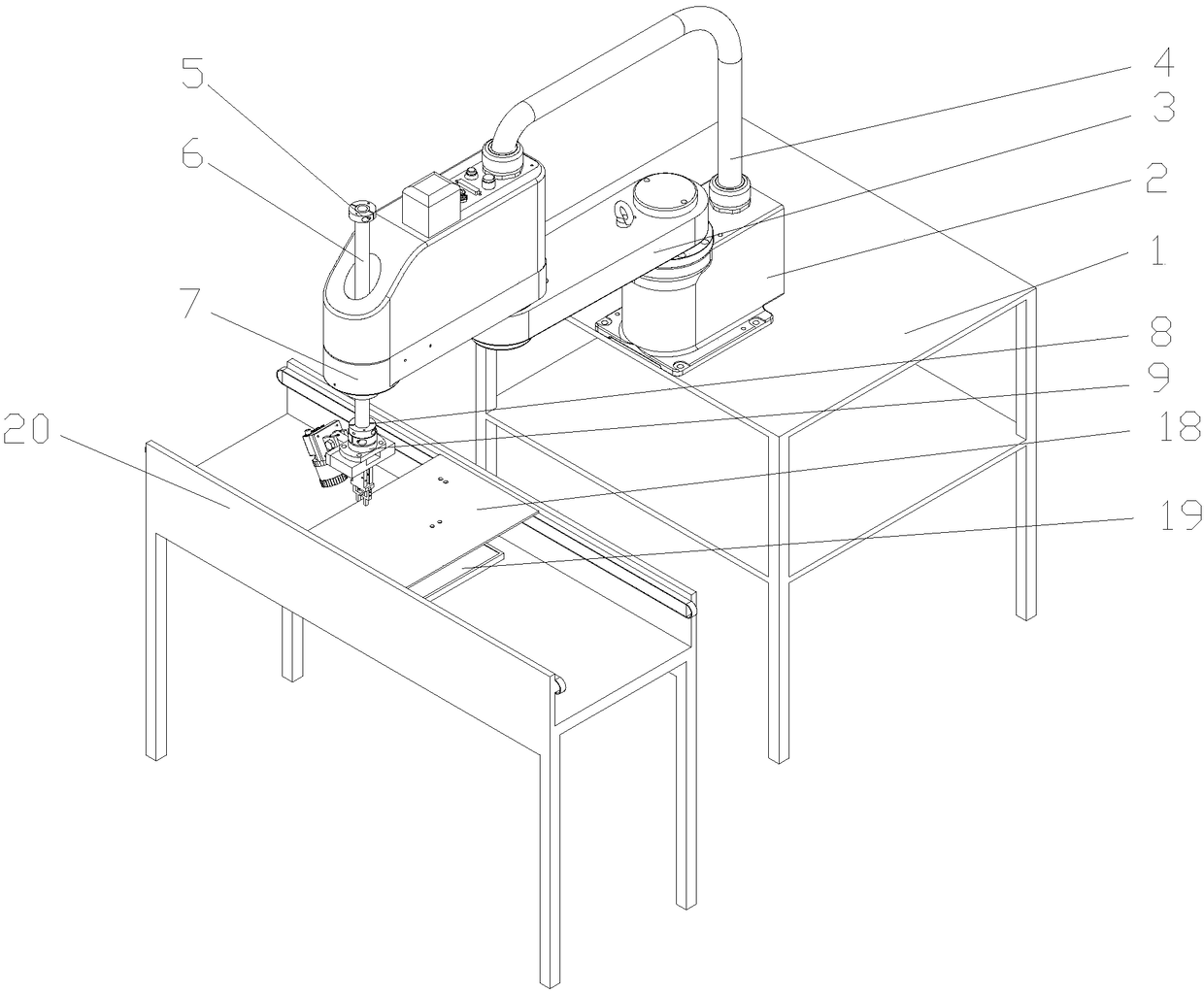
[0031] Such as figure 1 with figure 2 shown. The invention discloses a hand-eye coordination plug-in mechanism for electronic components based on a robot, which includes an industrial four-degree-of-freedom robot arranged on a workbench 1; the industrial four-degree-of-freedom robot includes a screw rod 6 installed on a forearm 7; the screw rod The lower end of 6 is equipped with a parallel opening and closing type pneumatic gripper mechanism; the side of the parallel opening and closing type pneumatic gripper mechanism is connected with a movable transfer mechanism for installing the industrial camera 16;
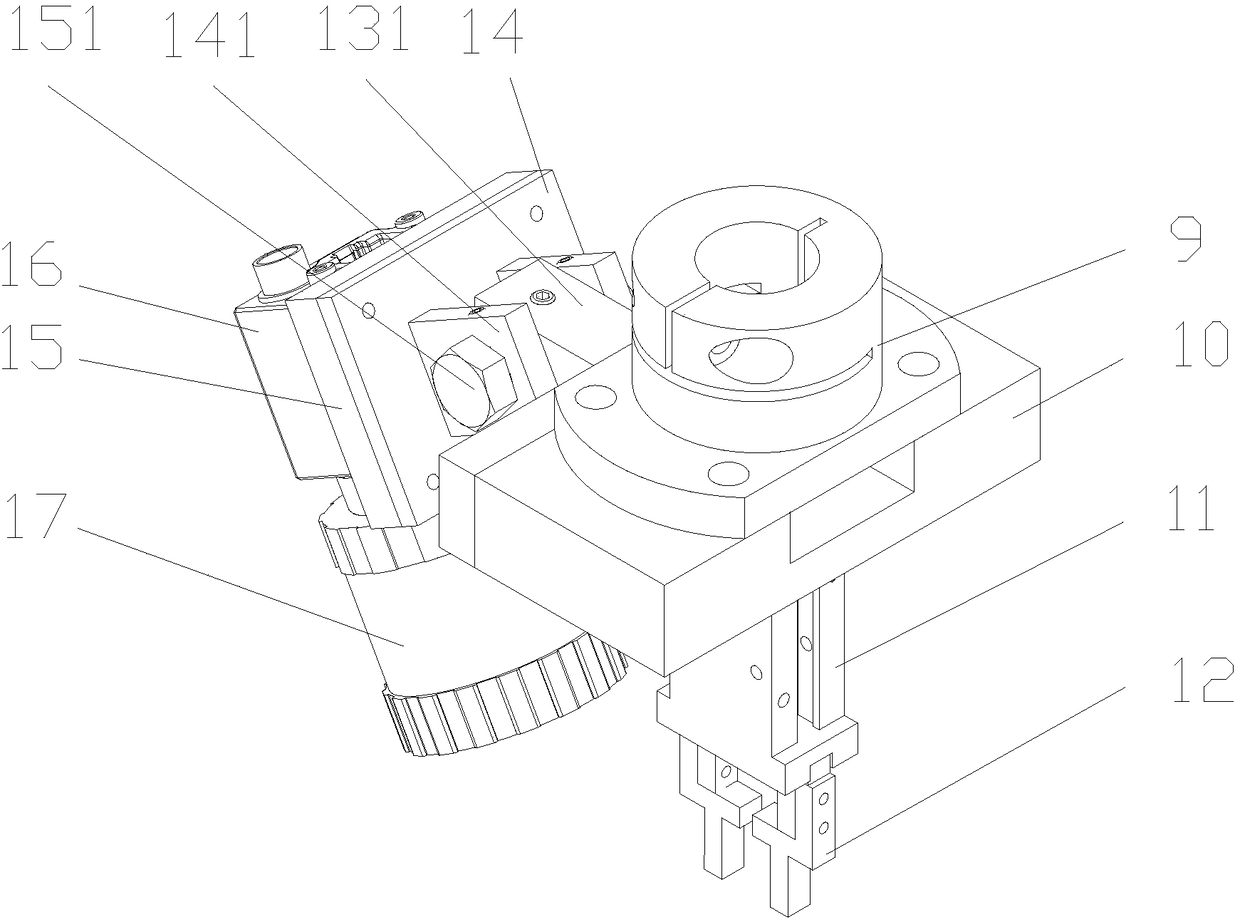
[0032] The movable transfer mechanism includes a first transfer board 13 and a second transfer board 14; the first transfer board 13 has a shoulder 131, and the second transfer board 14 has a concave corresponding to the shoulder 131. shoulder 141, the protruding shoulder 131 is placed in the concave shoulder 141, and the protruding shoulder 131 and the concave shoulder...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More