

Underwater gravity gradient target detection method based on Newton iteration method
A Newton iteration method and gravity gradient technology, applied in the field of passive navigation target detection, can solve the problems of complex methods and low precision, and achieve the effect of simple method, less calculation amount and good stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
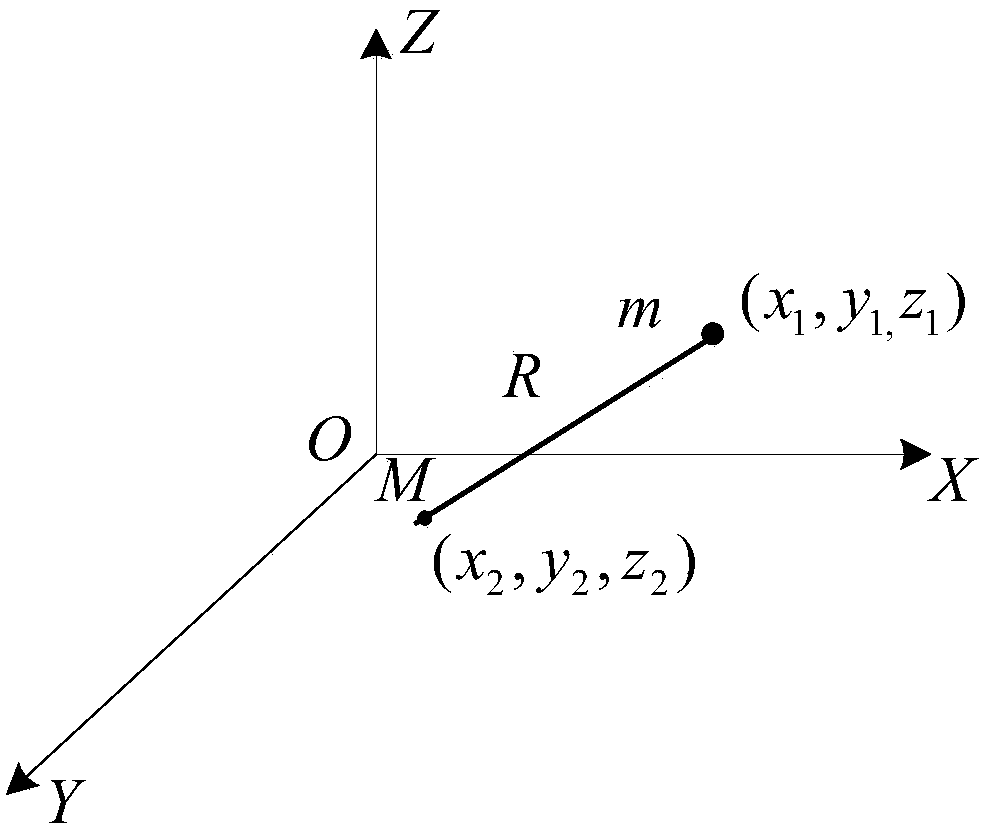
[0038] The schematic diagram of the three-dimensional coordinate system of the detection target is as follows: figure 1 As shown, according to the law of universal gravitation, in such as figure 1 Two objects in the space, two objects with masses m and M respectively, the coordinates are (x 1 ,y 1 ,z 1 ),(x 2 ,y 2 ,z 2 ), and the distance between them is R.
[0039] The universal gravitational force between two objects:
[0040]
[0041] In the three-dimensional coordinate system located at (x 1 ,y 1 ,z 1 ) The particle pair with mass m at (x 2 ,y 2 ,z 2 ) The gravitational position generated by the measuring point is:
[0042]
[0043] Here G is the gravitational constant. Taking the first order derivative of the above formula can get:
[0044]
[0045]
[0046]
[0047] Calculate the second order derivative of formula (1):
[0048]
[0049]
[0050]
[0051]
[0052]
[0053]
[0054]
[0055]
[0056]
[0057] By m=δv,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More