

Unmanned aerial vehicle aerial image road extraction method based on deep learning
A technology of road extraction and deep learning, applied in neural learning methods, computer parts, instruments, etc., can solve the problems of inapplicability to complex scenes and weak robustness, and achieve robustness enhancement and detection speed improvement. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
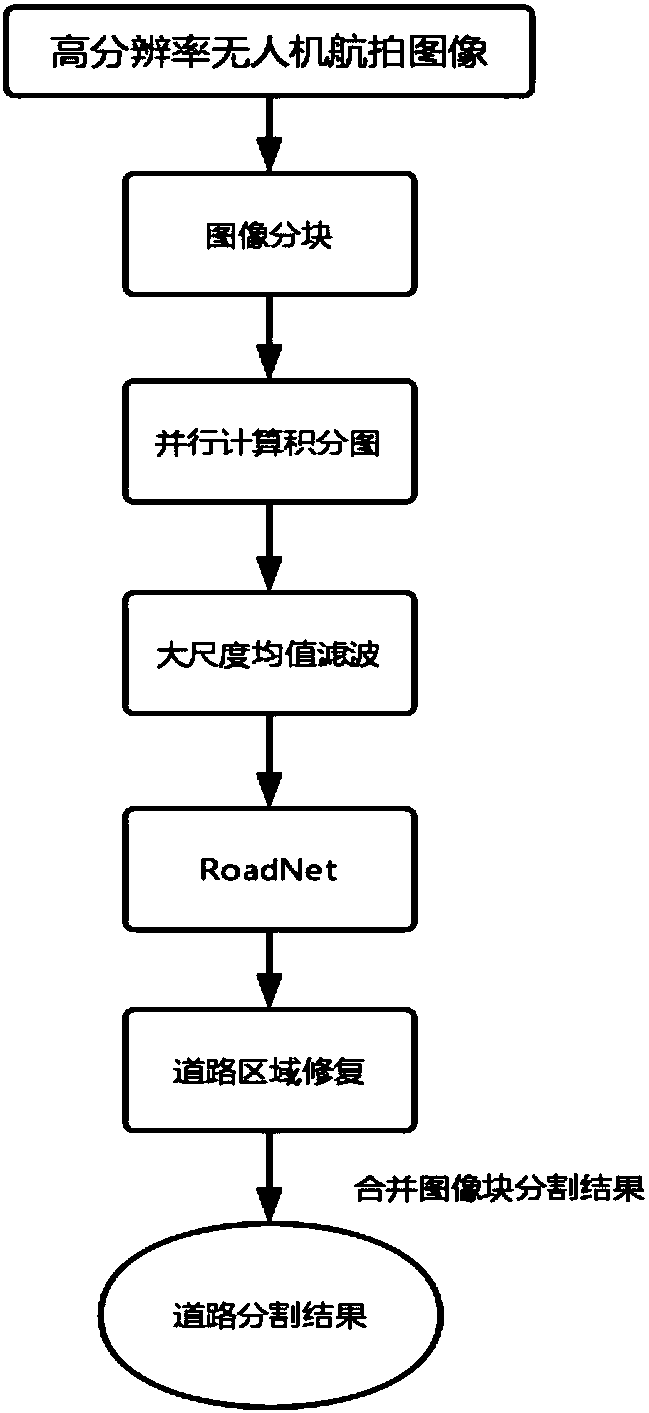
[0043] see figure 1As shown, the present invention is a method for extracting roads from UAV aerial images based on deep learning. First, the high-resolution UAV aerial images are divided into blocks, and then the divided images are quickly calculated using a multi-threaded parallel computing method. The graph model, followed by large-scale mean filtering based on the integral graph model, and then the road segmentation model is obtained through the fully convolutional neural network, and finally the road area is repaired to complete the road detection. The specific steps are as follows:
[0044] S1, block the high-resolution UAV aerial image;
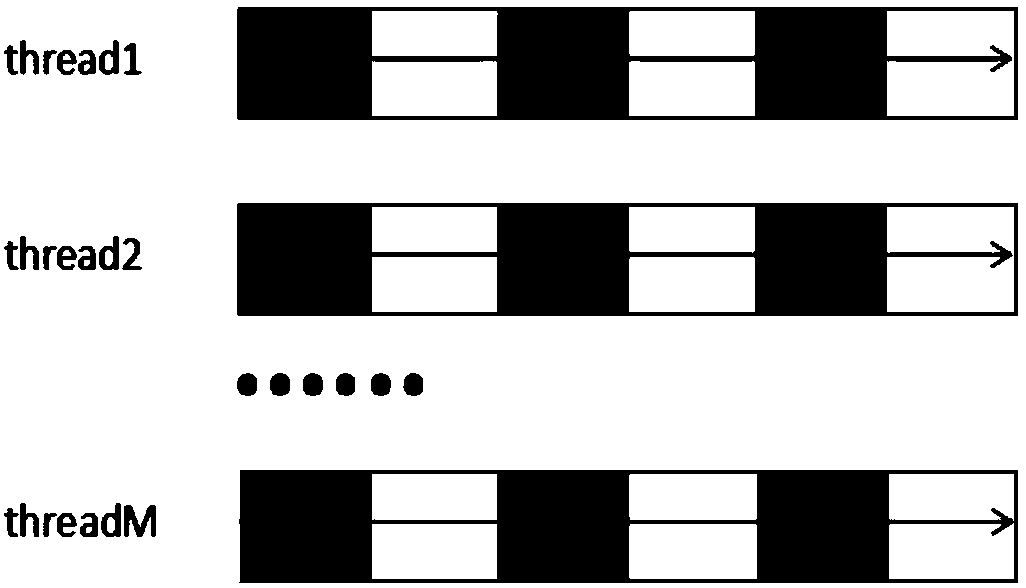
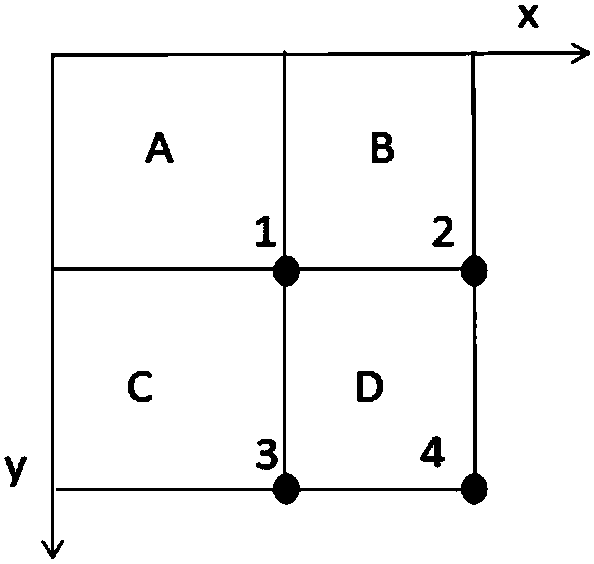
[0045] For the UAV aerial image with a resolution of 6000*4000, the image is divided into 48 small blocks of 1000*500. For each image, the road segmentation result is obtained separately, and finally the image blocks are merged to obtain the final road segmentation result. When calculating the integral graph model of the divided imag...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More