

Synchronous localization and mapping method based on improved image matching strategy
An image and strategy technology, applied in the direction of instruments, character and pattern recognition, computer components, etc., can solve problems such as low efficiency, poor robustness, inaccurate maps, etc., and achieve the effect of improving elimination efficiency and enhancing robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
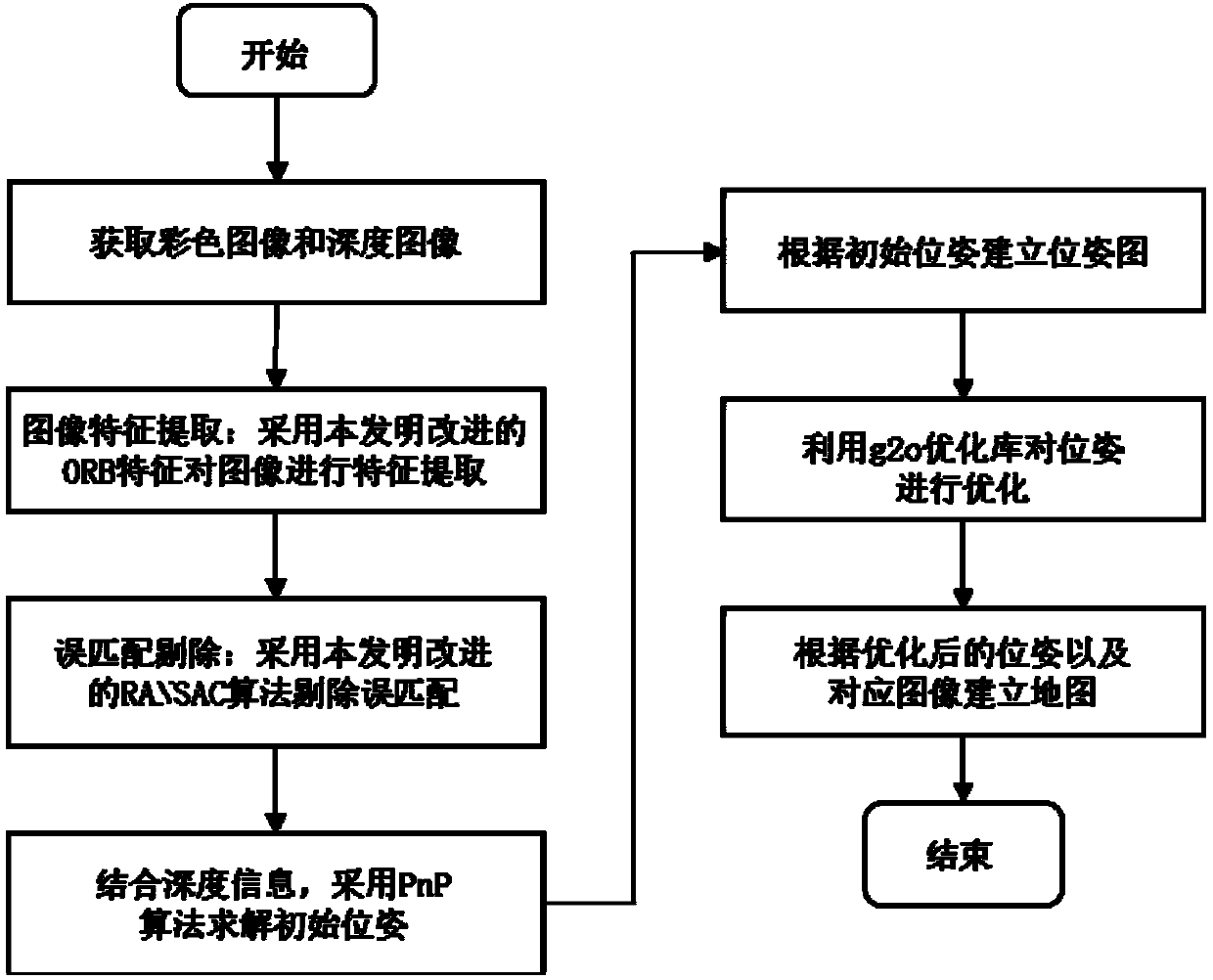
[0061] The present invention aims at the problems of poor robustness in the original ORB feature tracking process, high number of iterations of RANSAC and accumulation of errors in the positioning process when feature matching is performed when the proportion of inliers is low, and adopts the present invention to improve ORB features and The improved RANSAC algorithm combined with the g2o optimization library completes the tasks of positioning and mapping. Whole flow chart of the present invention is referring to explanation appendix figure 1 , the specific implementation method is divided into the following steps:
[0062] Step 1, install the open source driver libfreenect2 of Kinect, and write the corresponding program to obtain the color map and depth map of the surrounding environment through Kinect.
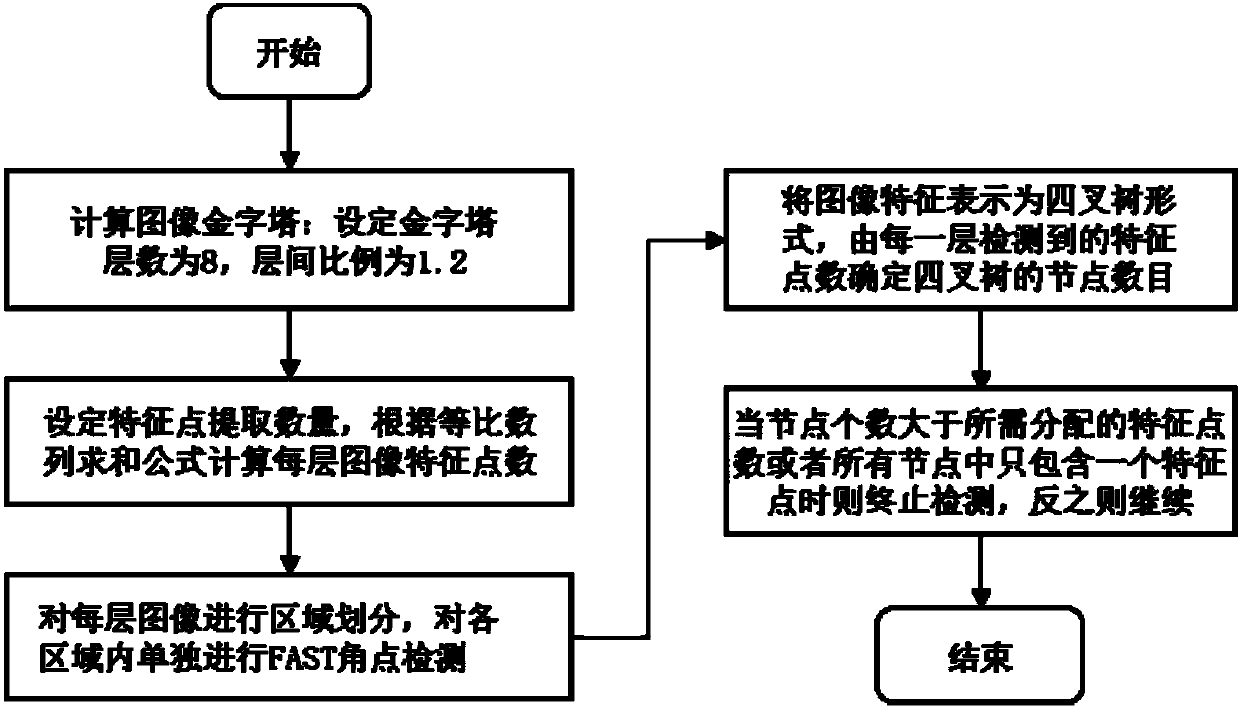
[0063] Step 2, use the improved ORB feature to perform feature extraction on the image, see the attached figure 2 .
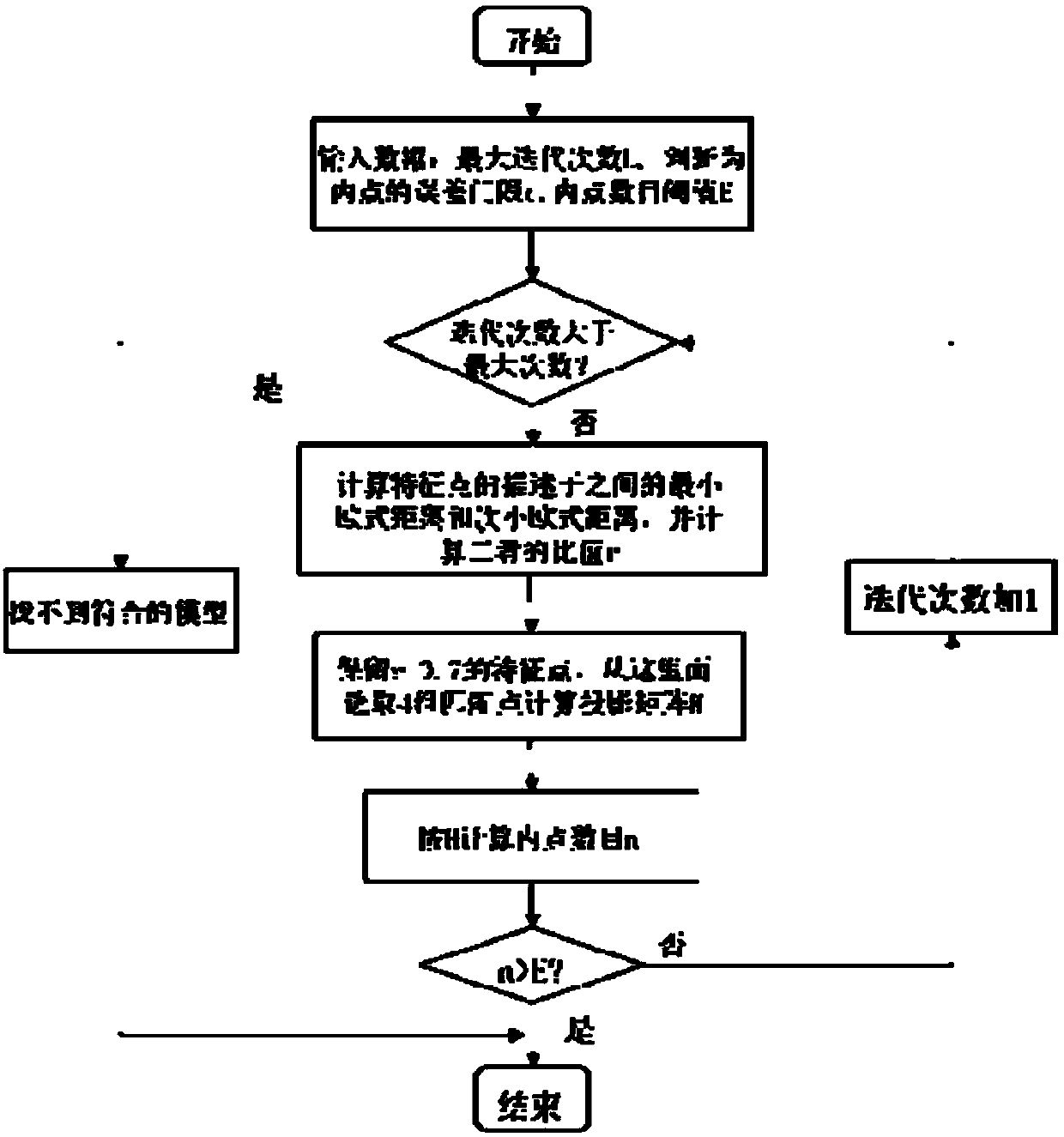
[0064] Step 3 is to perform feature matching on the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More