

Multi-intelligent robot task distribution method facing dynamic task
A technology for intelligent robots and dynamic tasks, applied in instruments, genetic rules, DNA computers, etc., can solve problems that affect task completion, cannot meet real-time performance, deadlocks, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0094] The present invention will be described in detail below according to the accompanying drawings, which is a preferred embodiment among various implementations of the present invention.
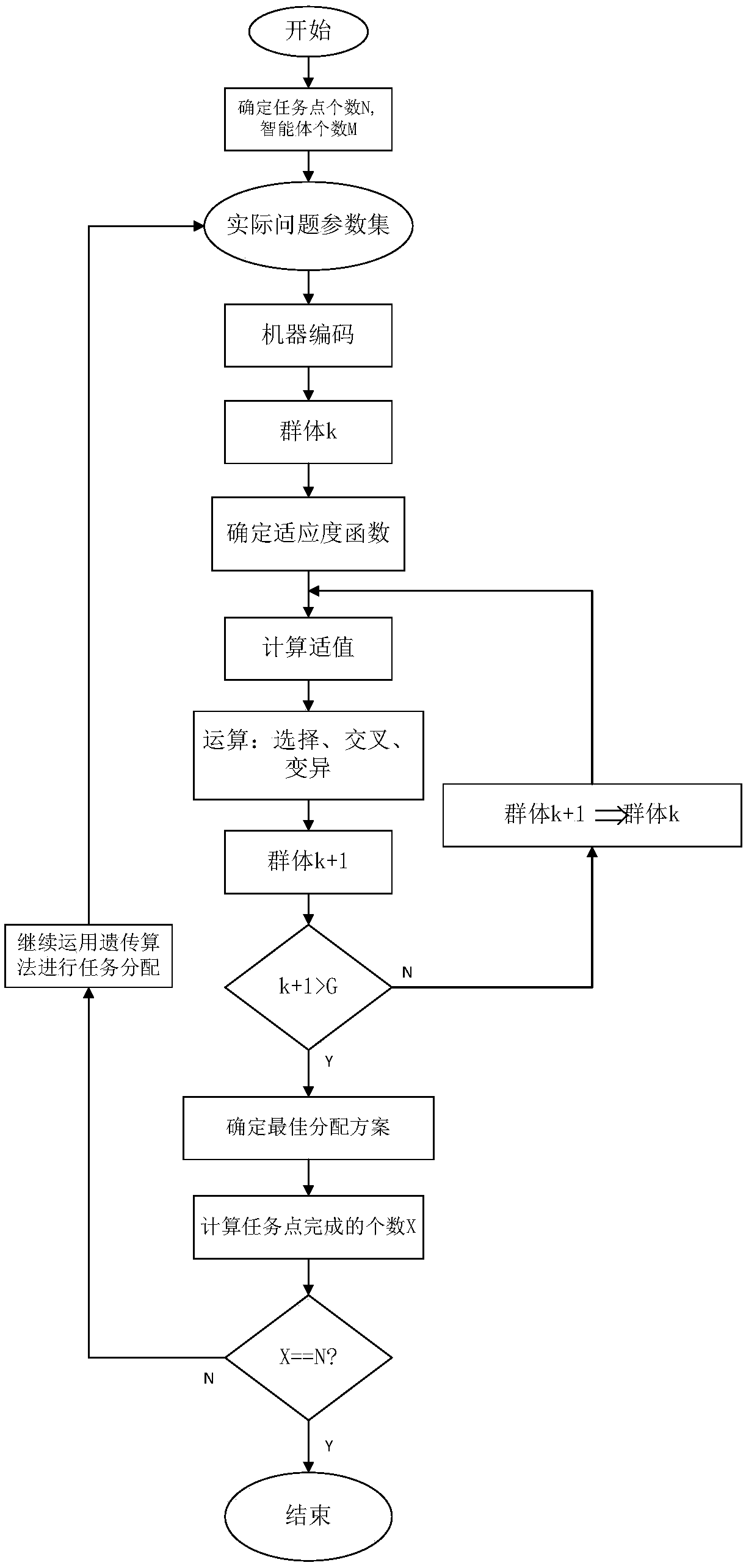
[0095] In a preferred embodiment, a dynamic task-oriented multi-intelligent robot task allocation method, the present invention proposes a dynamic task-oriented genetic algorithm, which solves the problem of multiple dynamic tasks in the environment through cooperation among intelligent robots.
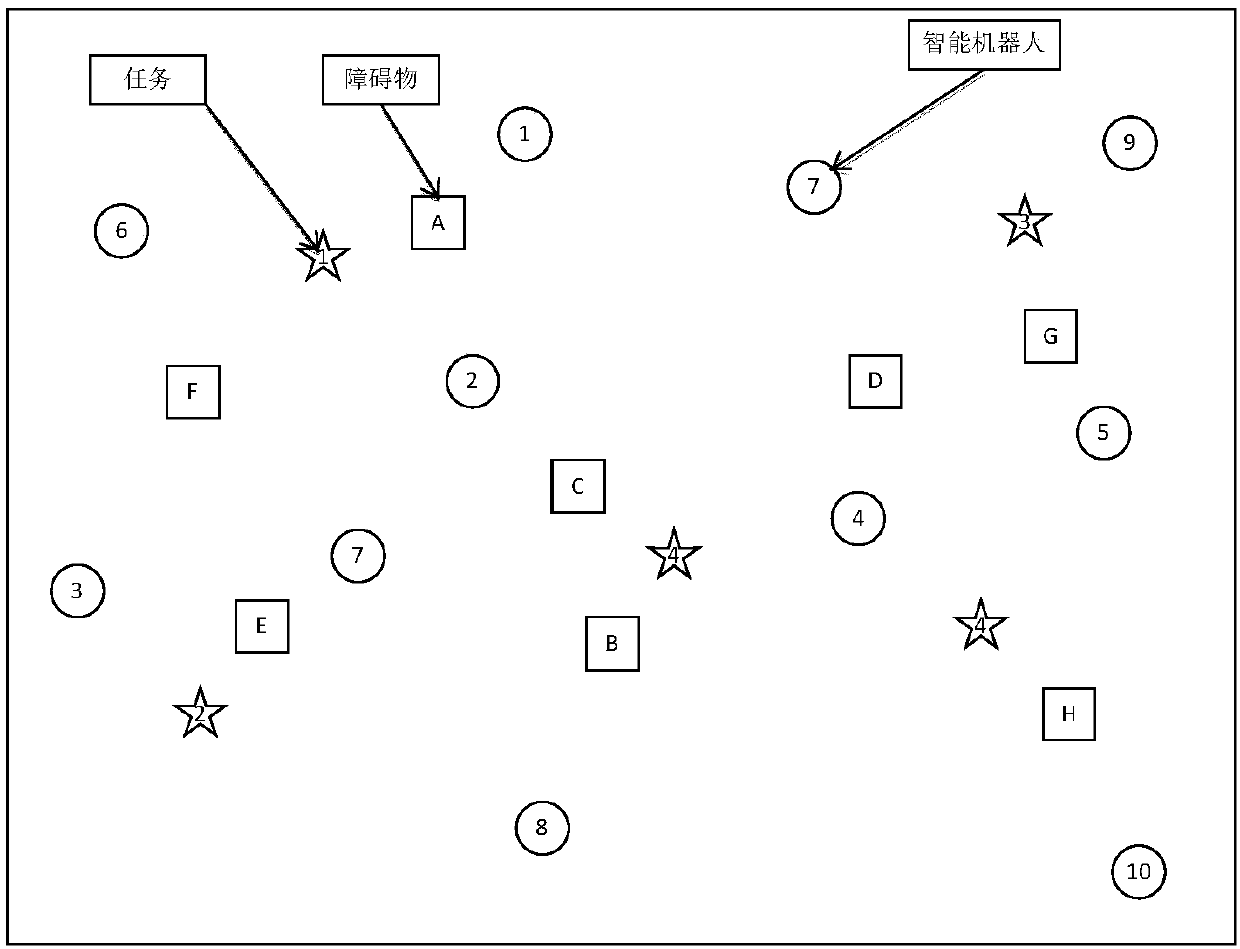
[0096] The cooperative cooperation of intelligent robots is embodied in: modeling the environment, obtaining information in the environment, and when a task occurs, assigning tasks based on the obtained information based on the improved genetic algorithm. Once a task is completed, the intelligent robot in the system can reuse it through communication. The improved genetic algorithm assigns tasks to idle intelligent robots, and cooperates with other intelligent robots to perform unfinished tasks u...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More