Automatic guiding obstacle avoidance robot trolley in modern logistics and control method thereof
A technology of automatic guidance and modern logistics, applied in the direction of non-electric variable control, vehicle position/route/height control, motor vehicles, etc., to achieve high precision, easy to implement, and reduce errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
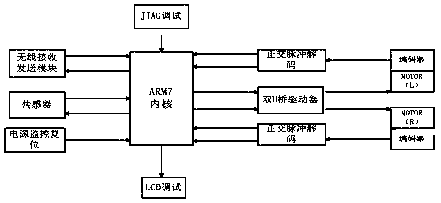
[0047] Embodiment 1, system hardware design: a robot trolley for automatic guidance and obstacle avoidance in modern logistics, including a robot trolley, a group of ultrasonic detection devices are installed on the front and both sides of the robot trolley, and the set of ultrasonic detection devices It includes a plurality of ultrasonic sensors, each ultrasonic sensor is electrically connected to a fuzzy controller, and a controller is installed on the robot car, and the controller is respectively electrically connected to a plurality of ultrasonic sensors through a wireless transceiver module, and the controllers are respectively It is electrically connected with a plurality of fuzzy controllers; the controllers are respectively electrically connected with the servo motors on the wheels of the robot trolley through double H-bridge drivers; the encoder is connected with each of the above servo motors for detecting the rotational speed; Connected with the encoder and the contr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com