

Method for implementing a variable parameter PID motion controller based on Ethernet Powerlink
A technology of motion controller and implementation method, applied in electric controllers, controllers with specific characteristics, program control, etc., can solve problems such as low real-time performance, high hardware implementation cost, and difficulty in adapting to complex environments, and achieve improved real-time performance. performance, reduce development costs, and speed up system adjustment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
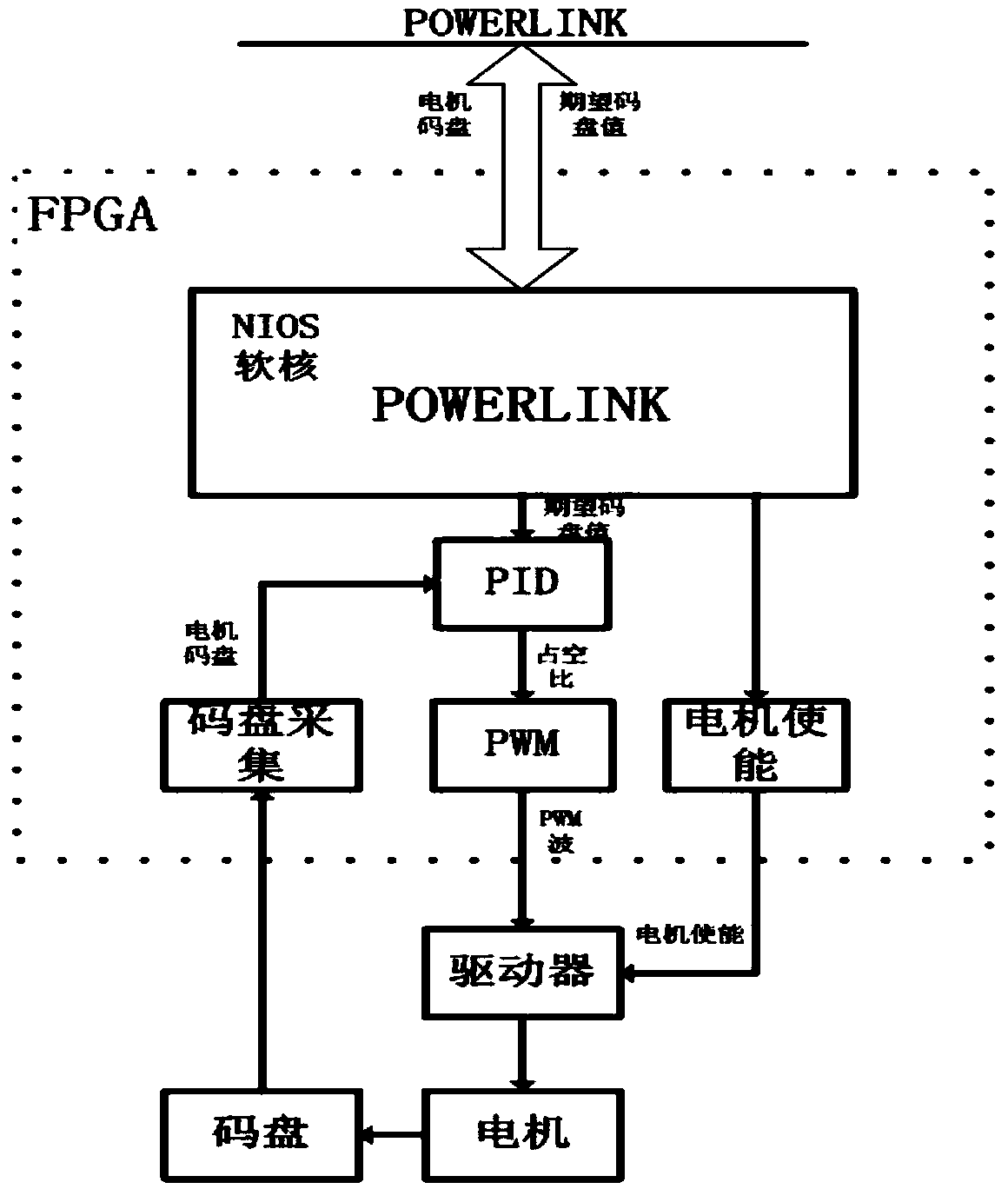
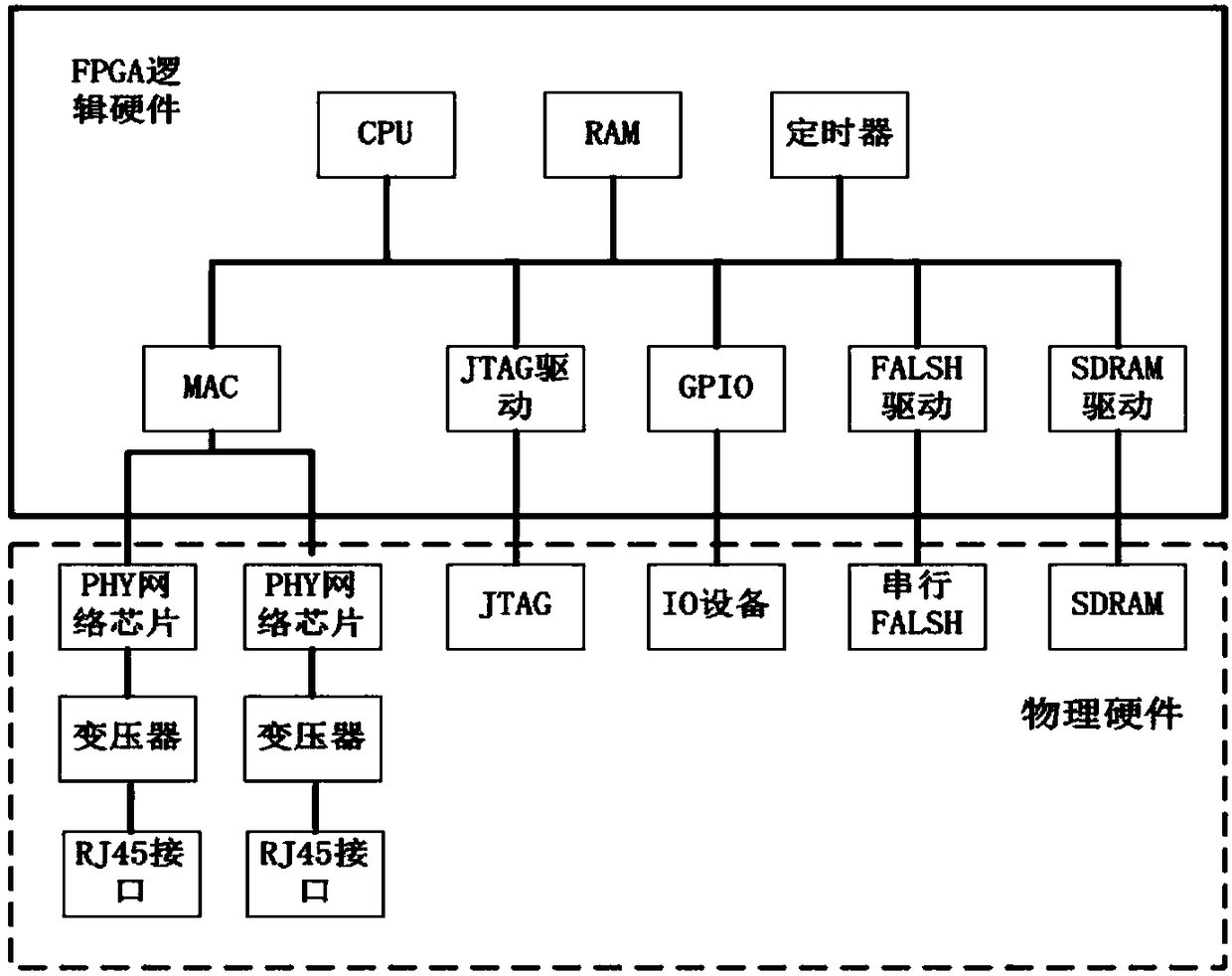
[0047] The above realization method of variable parameter PID motion controller based on Ethernet Powerlink, Powerlink module is used to run real-time Ethernet to realize data exchange with the master station. Its implementation block diagram is as follows figure 2 As shown, FLASH, SDRAM, JTAG, and GPIO drivers are implemented in FPGA with hardware description language, which is used to interface with peripheral devices, and MAC (MediaAccess Control) is implemented as the data link layer of real-time Ethernet, which is the connection The physical medium of the physical layer is connected to the network card chip. At the same time, two Ethernet physical layer interfaces are enabled to facilitate the networking of the control system. After obtaining the expected position information sent by the master station, through the parallel IO port of Powerlink, the information is sent to the variable parameter PID module in the FPGA in the interrupt of the Powerlink synchronization fun...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More