

Method and system for turning control under automatic driving
A turning control and automatic driving technology, applied in the control/adjustment system, non-electric variable control, two-dimensional position/channel control and other directions, which can solve the problem of inability to achieve precise turning cut-in, large turning yaw distance, large adjustment distance, etc. problem, to achieve the effect of short adjustment time, fast turning and small overshoot
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] In order to make the object, technical solution and advantages of the present invention clearer, the embodiments disclosed in the present invention will be further described in detail below in conjunction with the accompanying drawings.
[0045] In the natural coordinate system, assuming that the aircraft can maintain the altitude and true air speed, then in the two-dimensional plane natural coordinate system, the tangential acceleration a τ , centripetal acceleration a n . Assuming that at any moment, the ideal slope angle is The acceleration due to gravity is g, then:
[0046] During the turning process of the aircraft disc, let the heading angle rate be ω, and the true speed be V 空 , then there are:
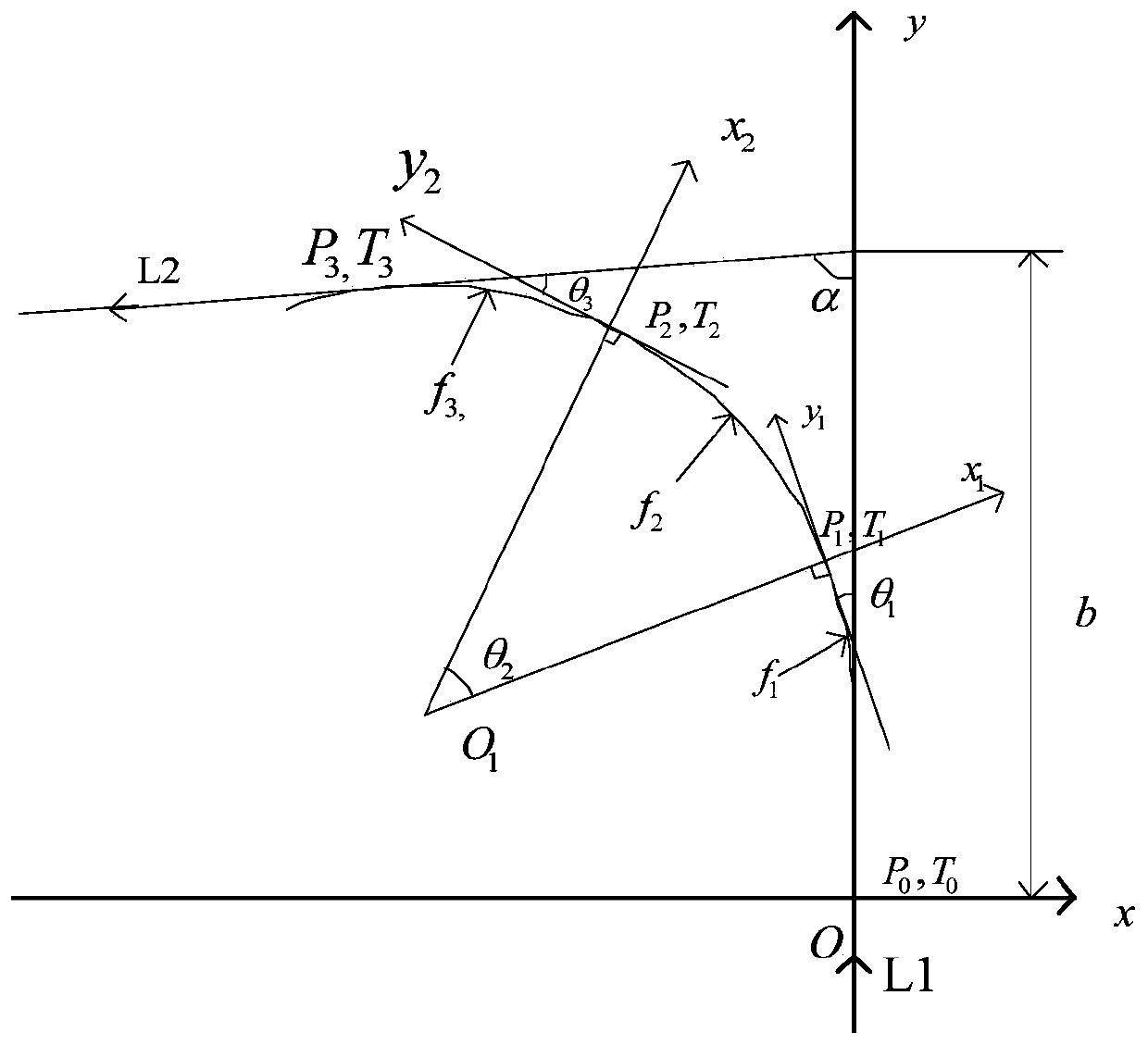
[0047] In this example, refer to figure 1 , shows a schematic diagram of a whole turning process in an embodiment of the present invention. Such as figure 1 , in this embodiment, according to the characteristics of the aircraft's coordinated turning, the tur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More