

Non-cooperative target relative navigation motion estimation method and system based on multi-source information fusion
A multi-source information fusion, non-cooperative target technology, applied in the field of non-cooperative target relative navigation motion estimation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0077] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
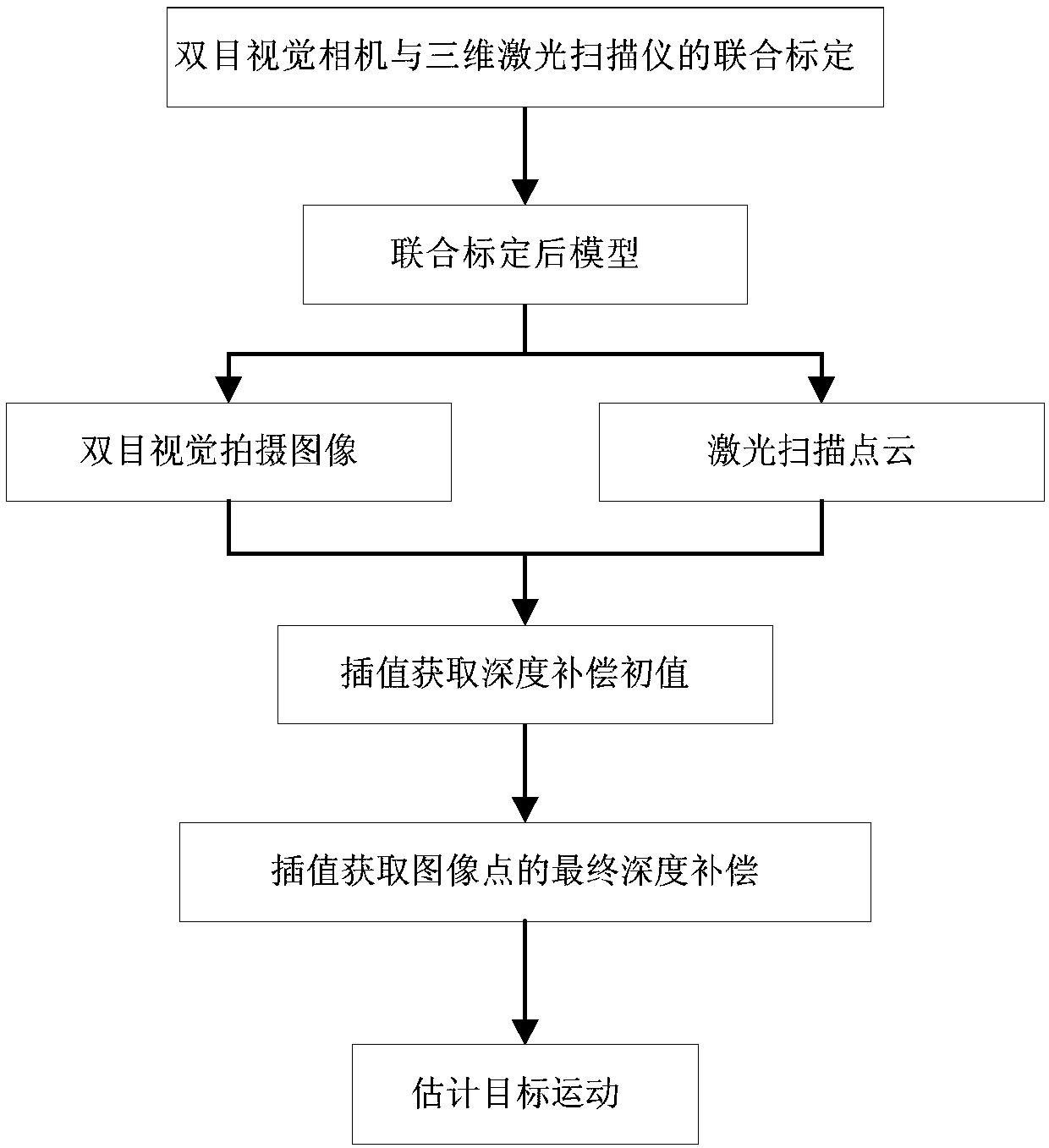
[0078] The basic idea of the present invention is: a non-cooperative target relative navigation motion estimation method and system based on multi-source information fusion. Firstly, a joint calibration method of the vision-laser measurement system is given to obtain the relative position between the two sensor coordinate systems. pose relationship; further obtain the image information of the visual camera and the point cloud information of the 3D laser scanning surface, and fuse the image information and the point cloud information through the interpolation method; finally, obtain the kinematic parameters through the feature points to further complete the 3D motion estimation of the target.
[0079] The binocular vision camera is installed on the installation platform to ensure that the spatial position and posture of the binocular ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More