

Self-adaptive neural network automatic berthing control method and equipment for underactuated ship and medium
A neural network and control method technology, applied in the field of underactuated ship adaptive neural network automatic berthing control, can solve the problems of actuator time-varying gain, model dynamic uncertainty and unknown disturbance, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example 1
[0185] Example 1: In the model parameter m u 、m v 、m r , f u (υ) and f r (υ) are unknown, the design parameter k u =diag([k 1 ,k 2 ]) = diag([5,6]), k r =k 3 =25, δ 1 =4×10 -5 ,δ 2 =2×10 -4 、a 1 =0.01, a 2 =0.01,b 1 =0.02,b 2 =0.001, and Dynamic surface parameter e=0.01, additional control coordinate conversion parameter ω 1 =0.1, ω 2 = 0.25.
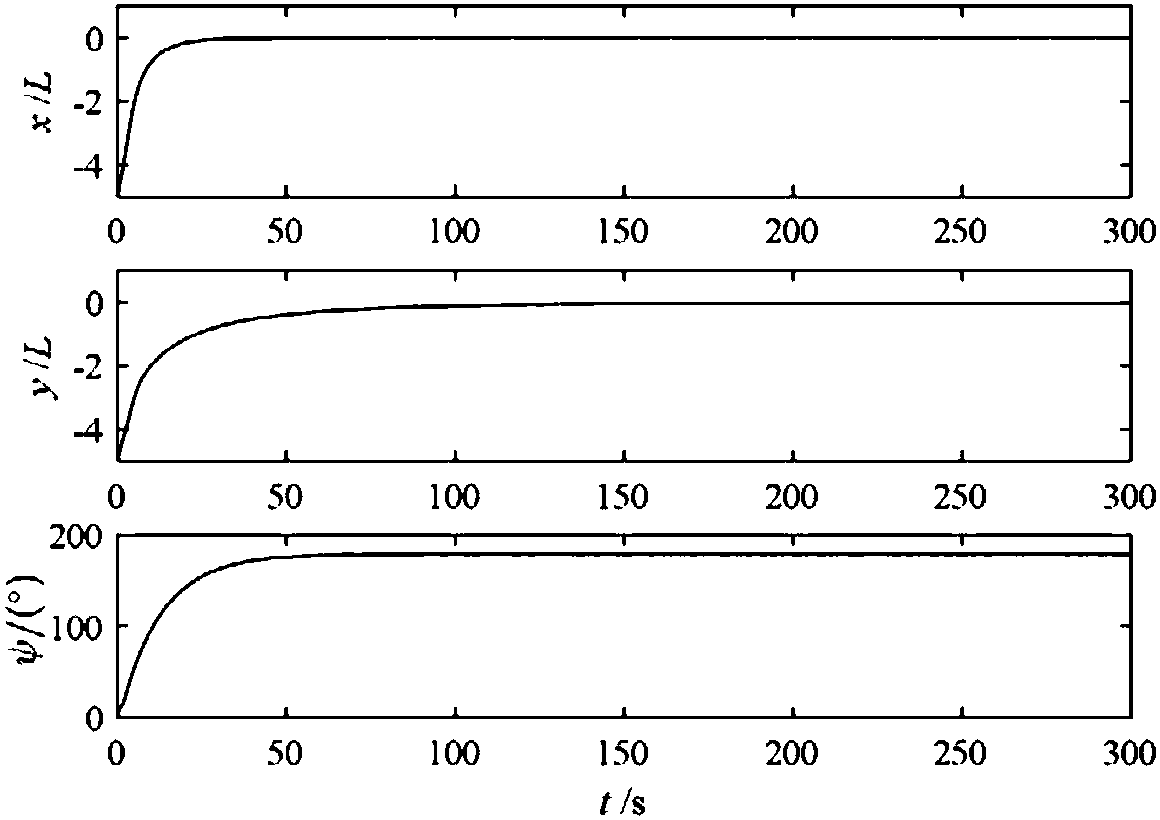
[0186] Such as figure 1 As shown, the lateral position of the ship reaches the predetermined berth x(d)=0 in 26s, but at this time, the longitudinal position has not yet reached the target value y(d)=0, and it needs to be fine-tuned by reversing the propeller, and it reaches the predetermined berth in 50s. berth point. In order to further verify the stability of the controller, the simulation time is 300s. The heading angle ψ curve shows that during the time period of 0s-90s, the heading gradually stabilizes from 0° to 180°.
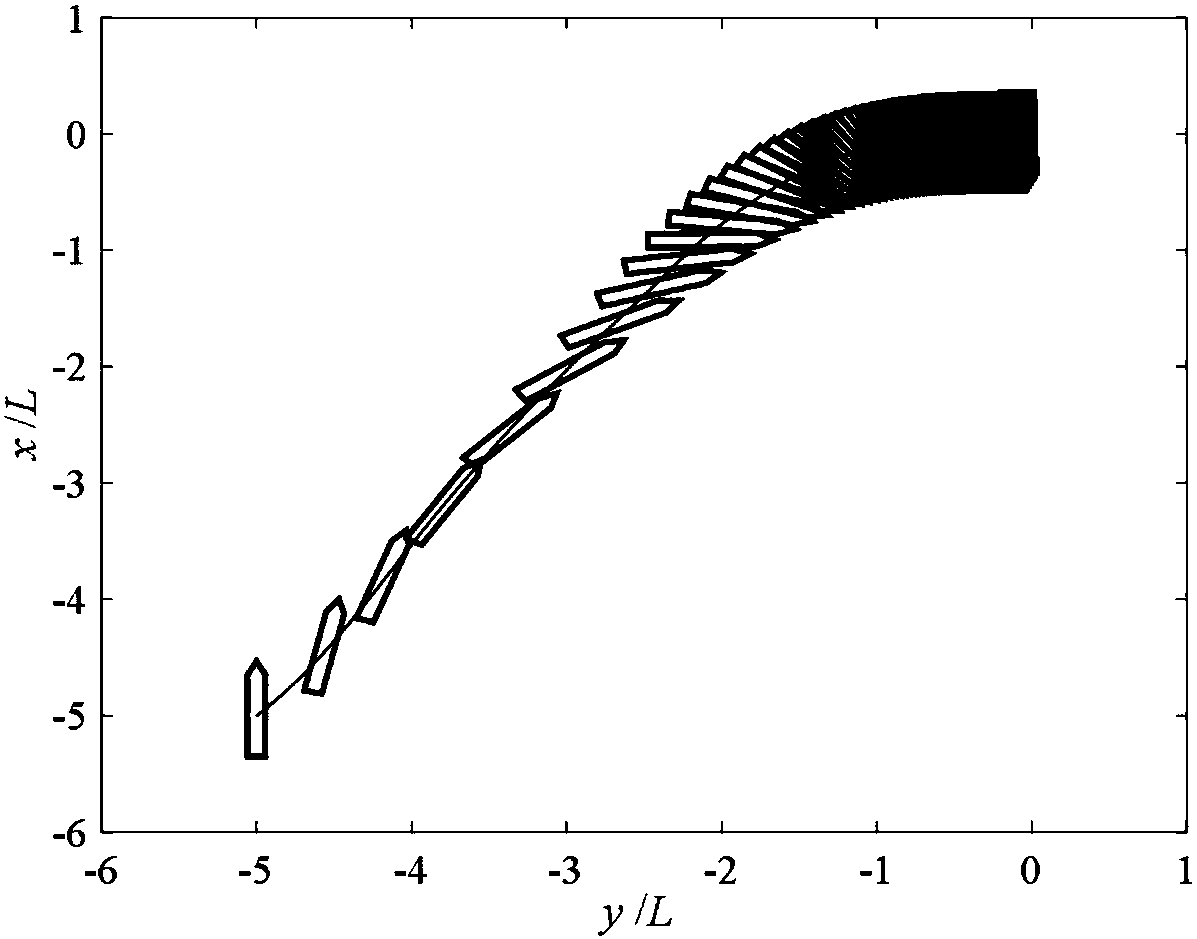
[0187] Such as figure 2 As shown, the change curve of the center position of the sh...
example 2
[0191] Example 2: On the basis of the previous section, in order to further verify the anti-disturbance ability of the control law, the bounded disturbance vector selected in this section includes two parts: constant value disturbance and sinusoidal function time-varying disturbance, and the disturbance vector is selected:
[0192]
[0193] For convenience of comparison, the settings are the same as those in Example 1. That is, the initial conditions such as the initial position and velocity of the ship and the design parameters of the control law remain unchanged, and the simulation results are as follows: Figure 6-Figure 10 shown.
[0194] Figure 6 It is given that the lateral position of the ship reaches the predetermined berth x(d)=0 at 58s, and at this time, the longitudinal position has not yet reached the target value y(d)=0, and needs to be fine-tuned by reversing the propeller, and finally reaches the predetermined berth in 210s. berth point. The heading angle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More