

Trajectory link control method for Delta robot based on Bezier curve
A Bezier curve and connection control technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., to achieve the effect of increasing running speed, improving efficiency, and reducing the change of angular acceleration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
[0028] Taking a 3-DOF Delta robot that does not consider the end rotation as an example, the application of the design method based on the Bezier curve trajectory connection proposed in the present invention in the Delta robot's pick-and-place trajectory planning is illustrated.
[0029] (1) The arc length parameterization of the second-order Bessel equation
[0030] Bezier curve is a very important parameter curve in computer graphics. It is used in some relatively mature bitmap software such as PhotoShop. The main significance of Bezier curve is that, whether it is straight line or curve, it can give mathematical Analytical description above. For the Delta robot, the real-time trajectory calculation needs to be completed within one bus cycle, and the analytical form of the curve equation is very helpful for computational efficiency.
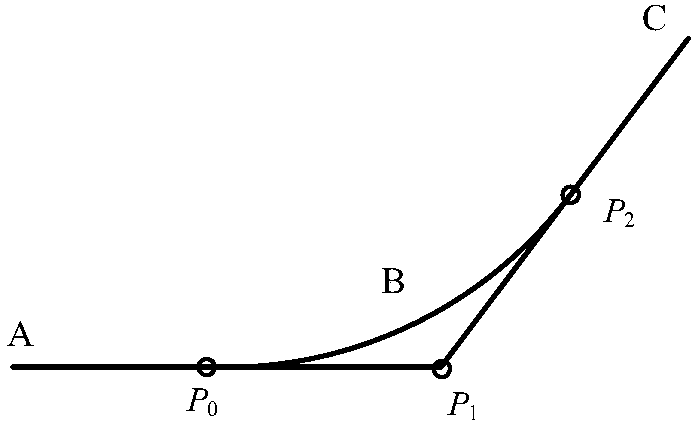
[0031] like figure 2 As shown, the second-order Bessel equation is given by P 0 , P 1 , P 2 Determined, the equation form is:
[0032] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More