

Disturbance perception control method
A control method and technology of expected trajectory, applied in electric controllers, controllers with specific characteristics, etc., can solve the problems of sensitivity to PID gain changes, poor anti-disturbance ability, and irreconcilability, and achieve good real-time performance and anti-disturbance ability. Strong, low-computation effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
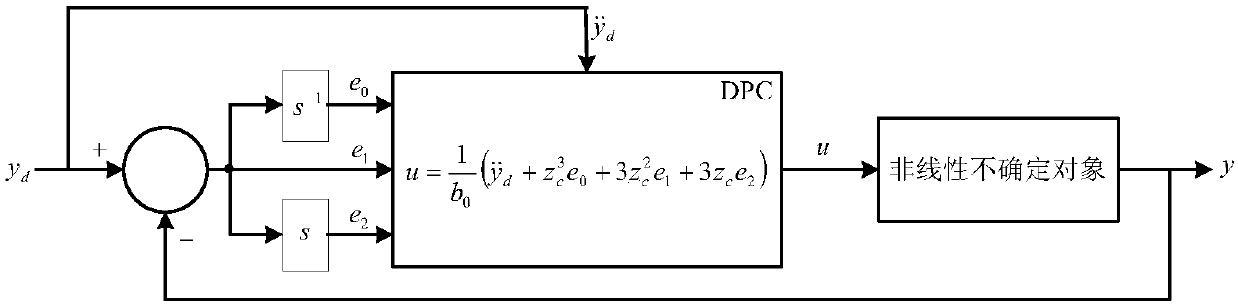
[0010] 1. Mapping ideas from nonlinear uncertain system models to disturbance-aware models
[0011] Suppose a second-order nonlinear uncertain system model is:
[0012]
[0013] Among them, y 1 ,y 2 ∈R is the two states of the system, u∈R is the control input of the system; f(y 1 ,y 2 ,t) and g(y 1 ,y 2 ,t) is an uncertain smooth function of the system, and g(y 1 ,y 2 ,t) is a non-negative function; d is the external disturbance; y is the system output.
[0014] Define the unknown sum perturbation state (also called the expansion state) y 3 for:
[0015] the y 3 =f(y 1 ,y 2 ,t)+d+g(y 1 ,y 2 ,t)u-b 0 u (2)
[0016] Equation (1) can be rewritten as the following perturbation system:
[0017]
[0018] Among them, b 0 ≠0 is a nonlinear uncertain function g(y 1 ,y 2 ,t) is an estimated value (not required to be precise), and it is a constant.
[0019] Due to the perturbation state y to the sum 3 There are no restrictions, and many nonlinear uncertain sys...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More