

On-line calibrating method of inertia/astronomy combination system error
A technology of combined system and calibration method is applied in the field of online calibration of inertial/astronomical combined system errors to achieve the effects of improving efficiency, improving comprehensive performance and improving reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment approach
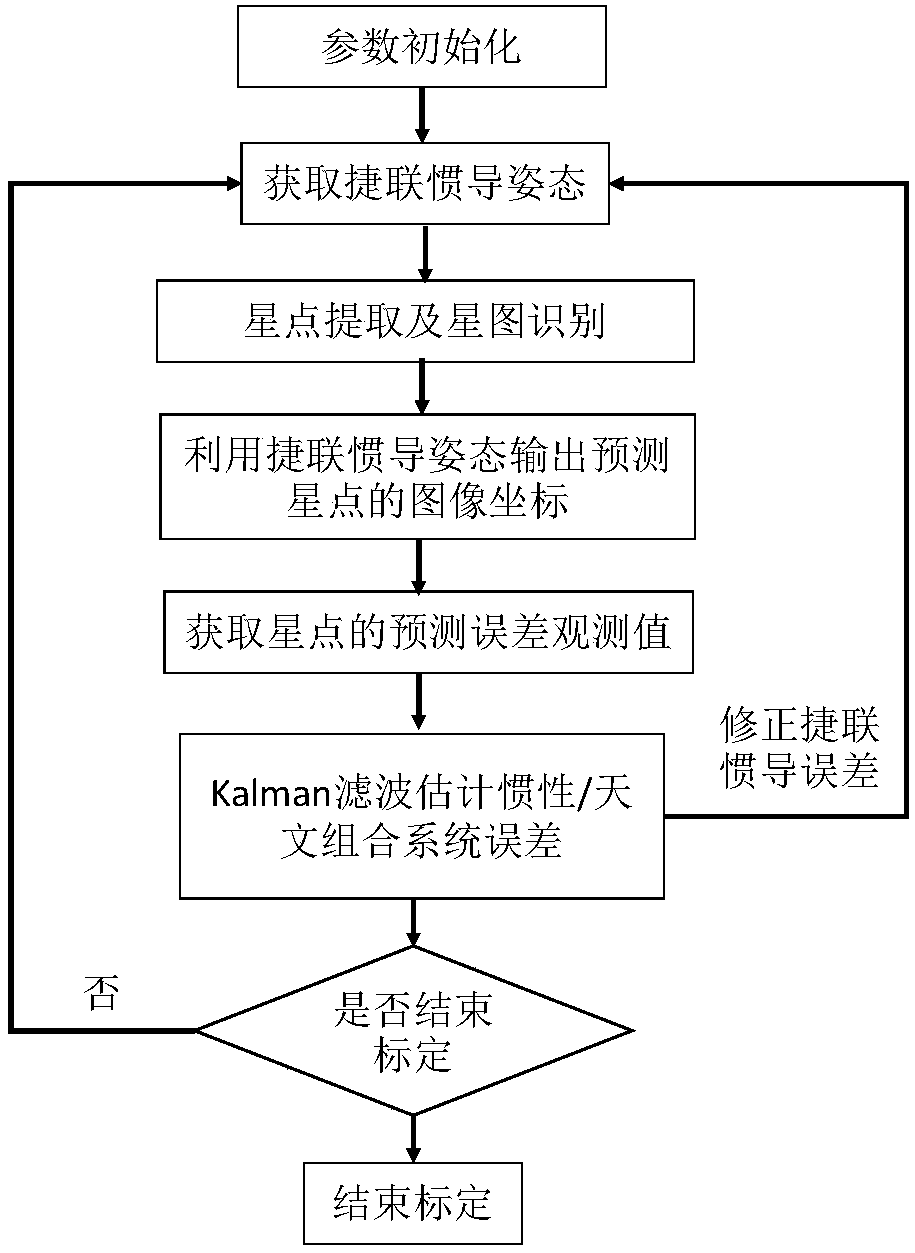
[0063] Step 6: Use the Kalman filter algorithm to optimally estimate the system error of the inertial / astronomical combined system. The specific implementation method is as follows:
[0064] 6.1 Establish a state-space model for online calibration of inertial / astronomical combined system errors
[0065] Dynamically model the state variable of the inertial / astronomical combined system error online calibration described in step 1.2, φ X , φ Y , φ Z Satisfy the differential equation:
[0066]
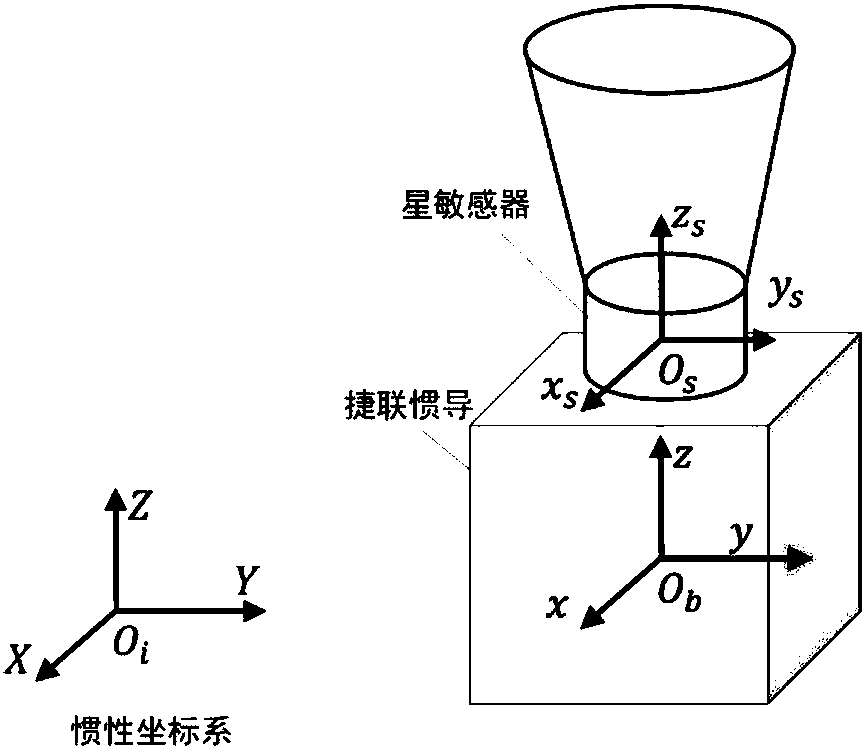
[0067] It is the attitude matrix relative to the inertial system output by the strapdown inertial navigation system.
[0068] Star habitual installation error angle ψ x ,ψ y ,ψ z Satisfy the differential equation:
[0069]
[0070] Three gyroscope zero bias error values δε x , δε y , δε z Satisfy the differential equation:
[0071]
[0072] The internal parameter error of the star sensor satisfies the following differential equation:
[0073]
[0074] Combining...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More