

Small multi-rotor unmanned aerial vehicle attitude solving method
A multi-rotor unmanned and aircraft attitude technology, which is applied in the field of unmanned aerial vehicle control and inertial navigation, can solve problems such as limited computing power of low-cost microcontrollers, reduce calculation time, improve real-time performance, and maximize operational flexibility Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
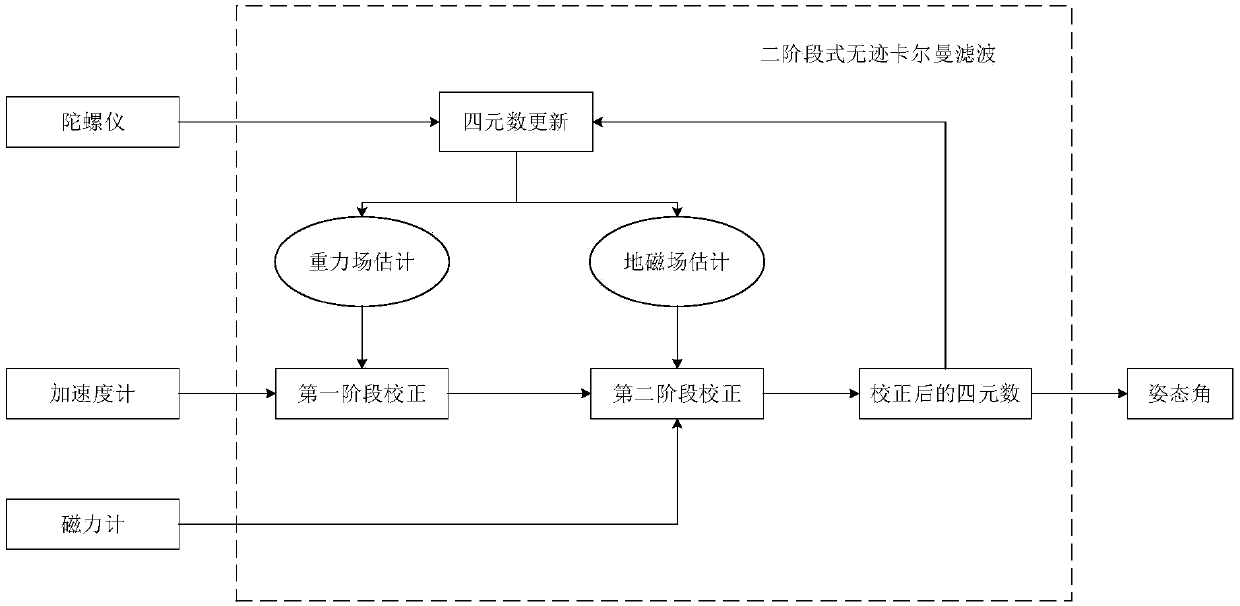
[0028] This embodiment provides a method for calculating the attitude of a small multi-rotor UAV. The method uses the quaternion as the state vector, uses the gyroscope data to update the state vector, and divides the acceleration data and the magnetometer data into two stages. processing, in the first stage, an initial correction of the quaternion state vector is performed using an improved unscented Kalman filter combined with accelerometer data; in the second stage, an improved unscented Kalman filter algorithm is combined with magnetometer data Apply further corrections to the quaternion state vector.
[0029] Specifically follow the steps below:
[0030] Step 1: Determine initial state estimates and its covariance
[0031] Read gyroscope data w x ,w y and w z , to calculate the discrete-time state transition matrix A k / k-1 , to calculate the predicted value of the state and its covariance
[0032] Step 2: Sigma point selection:
[0033] A set of weighted si...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More